XiaoMi-AI文件搜索系统
World File Search System分布函数
非线性耦合连续变量二分系统的量子经典熵分析
摘要:对应原理在量子力学中起着基础性作用,这自然会促使我们探究是否有可能在相空间中找到或确定量子态的接近经典类似物——这是经典和量子密度统计描述符的共同交汇点。本文通过研究在去除与给定纯量子态相关的 Wigner 分布函数所显示的所有干扰特征后出现的经典类似物的行为来解决此问题。因此,在两个四次振荡器在规则和混沌条件下非线性耦合的情况下,对连续变量二分系统进行线性和冯诺依曼熵的动态演化数值计算,并与相应的经典对应物进行比较。考虑了整个系统的三个量子态:高斯态、猫态和贝尔态。通过比较量子和经典熵值,特别是它们的趋势,表明这些熵不是纠缠产生,而是为我们提供有关系统(量子或经典)离域的信息。这种信息的逐渐丢失意味着量子和经典领域的增长,这与双方自由度之间相关性的增加直接相关,在量子情况下,这通常与纠缠的产生有关。

大规模 Schwinger 模型中的准碎裂函数
部分子分布和碎裂函数是分析大多数高能数据的核心 [1,2]。在光前沿,由于时间膨胀和渐近自由,强子由冻结的部分子组成 [3 – 5]。因此,量子色动力学 (QCD) 中的硬过程可以分解为可微扰计算的硬块乘以非微扰矩阵元素,例如部分子分布函数 (PDF) 和碎裂函数 (FF)。PDF 在光前沿被估值,并且本质上是非微扰的,这使得它们无法用标准欧几里得格子公式来计算,除了几个最低矩之外。这个缺点可以通过使用准分布 [6] 及其变体 [7,8] 来避免。这些提议现在已被许多 QCD 格子合作所采用 [9 – 14]。我们最近展示了如何将这些概念扩展到量子计算 [15] 。夸克碎裂的概念起源于菲尔德和费曼的原创工作,他们提出了夸克喷流模型来描述半包容过程中介子的产生 [16] 。该模型本质上是一个独立的部分子级联模型,其中硬部分子通过发射连续的
Gaël Obein 授权直接研究...
第一个要研究的属性是颜色。从 20 世纪初开始,CIE 制定了测量协议,并且对反射光谱和比色坐标之间的对应关系进行了标准化。我们现在是 1931 年。比色法诞生了,得益于它,分光光度计、色度计、感知模型、表示空间、辨别阈值、公式方程以及一大堆工具和指标将会迎来这一天。比色法如今已是一门成熟的科学。它测量颜色并帮助制造商描述、复制或监控他们的产品。标准已经到位并且有效。彩虹色或随角异色涂料的上市给过去 15 年的市场带来了一些改变。面对这些效果,无论是形态蝴蝶的自然效果,还是效果涂料的合成效果,经典比色法都显示出其局限性。有必要实施双向比色法。相关辐射量不再是反射因子,而是BRDF,英文缩写为亮度系数的双向分布函数。 BRDF 使用测角分光光度计进行测量。该领域已经取得了巨大的努力和进展,并且角色表面的表征得到了很好的掌握 [3][4]。我的一部分
地震
地下水和土壤空气的变化可能是地震和其他事件的前兆,这些事件受岩体应变的积累和变化影响。分析了水文地球化学系统中氡信号的主要特征,并讨论了氡地震前兆的可能机制。假设任何氡从应变状态的岩石基质矿物转移到孔隙流体的初始阶段都具有遵循一般动力学定律的热分子活化特性。在此基础上,开发了一种新的氡异常模型,其中涉及所谓的转换系数、动力学复合物、放射性衰变动力学、一级转移过程(例如吸附)和水力输送(周转)。所有这些动力学参数都与给定系统中给定前体的某些特征停留时间有关。这两组参数都控制着氡前体输出曲线的幅度和形式。水文地球化学系统中前兆的主要特征是水的停留时间分布函数 (RTDFw) 和前兆成分 (RTDFc)。这些函数可以通过成熟的同位素水文学示踪技术进行评估。本文给出了一些方法论结论和建议,说明如何使用同位素水文学数据来分析和解释地震的氡(和其他水化学)前兆信号。

一种基于...的 DTM 误差估计新方法
摘要:我们研究的主题是基于机载激光扫描 (ALS) 得出的数字地形模型 (DTM)。本文基于常用的统计数据分析了 DTM 的垂直精度,即平均误差和标准差,假设误差呈正态 (高斯) 分布。还测试了另一种方法,即所谓的稳健方法 (Höhle, Höhle 2009),其中中位数代替平均误差,标准化中位数绝对偏差 (NMAD) 代替标准差。本文提出了一种基于拉普拉斯函数的替代方法来描述概率密度函数,其中提出了拉普拉斯函数的参数用于 DTM 误差估计。测试区域位于意大利伊斯普拉联合研究中心附近; 2005 年收集了覆盖测试区域的原始 ALS 数据,并对其进行了处理以生成 DTM。精度分析基于 DTM 与原始 ALS 数据和现场高度测量的比较。从 ALS 数据计算出的 DTM 误差分布明显不正常,证实了文献中报告的其他结果。高斯分布函数大大高估了垂直 DTM 误差;然而,稳健方法低估了它们。拉普拉斯函数与误差直方图的匹配度最高,从该函数得出的精度参数可以被视为 DTM 精度评估的替代方法。1.简介

B.Tech第四学期
模块1:线性代数简介(8个讲座)向量,向量空间,线性独立性,碱基和维度,正交性,线性图和矩阵,矩阵的基本子空间,rank-nullity Theorem。模块2:光谱分解(6个讲座)特征值,不变子空间,内部产物,规范,正统碱基,光谱定理,等法,极值和奇异值分解,应用。模块3:矩阵(5个讲座)特殊矩阵,规范和决定因素的特性。模块4:概率简介(6个讲座)经典和公理概率,概率空间,条件概率和独立性,总概率,贝叶斯规则。模块5:随机变量(8个讲座)定义,常见示例,累积分布函数,概率质量函数,概率密度函数;随机变量的函数;期望 - 卑鄙,差异和时刻;特征和瞬间的功能;特殊的随机变量 - 二项式,泊松,统一,指数和高斯;共同时刻,有条件的期望;协方差和相关性 - 独立,不相关和正交随机变量;两个随机变量的函数;大量法律和中央限制定理的法律薄弱。模块6:随机过程简介(3个讲座)离散和连续时间过程;随机过程的概率结构;卑鄙,自相关和自相关功能;随机过程的示例:白噪声。文本/参考书:
M-Tech 生物医学仪器和信号处理
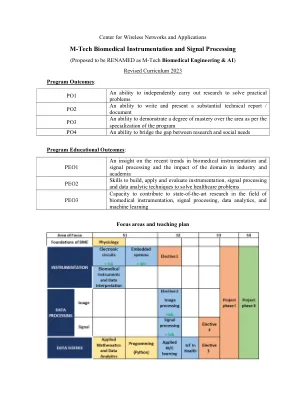
CO1 能够理解数据挖掘过程中涉及的步骤(例如预处理、分类、回归、聚类和可视化)并将其应用于医疗数据的分析。 CO2 能够描述不同的预测分析方法及其在医疗领域的应用。 CO3 能够评估来自不同来源的数据以创建有意义的演示文稿。 课程内容 使用 Python 进行数据分析:了解数据 - (a)属性、数据的统计描述、数据可视化、相似性 - 不相似性、(b)预处理 - 缺失值、噪声数据、数据缩减、数据转换 - 规范化、标准化、分箱、聚类。 使用 Python 进行应用数学:数学基础 - 线性代数 - 向量、矩阵、特征值、特征向量、奇异值分解、降维、主成分分析、线性变换。概率与统计:随机变量、概率分布、分布函数和属性、离散和连续、统计推断 - 估计和假设检验。机器学习(第 1 部分):机器学习基础、线性回归和逻辑回归(分类)。(第 2 部分将在下学期的应用机器学习课程中继续)教材 1. Jiawei Han 和 Micheline Kamber 编写的《数据挖掘概念和技术》 2. Rohatgi 和 Saleh 编写的《概率与统计简介》。 3. Christian Albright 和 Wayne Winston 编写的商业分析:数据分析与决策

GPS定位导航
2.1 GPS 的三个部分................................................................................................................4 2.2 GPS 卫星星座....................................................................................................................4 2.3 GPS 设备....................................................................................................................5 2.4 载波................................................................................................................................6 2.5 调制在每个载波上的信息.......................................................................................7 2.6 C/A 和 P 码....................................................................................................................8 2.7 单点定位....................................................................................................................11 2.8 相对定位....................................................................................................................12 2.9 静态和动态定位....................................................................................................13 2.10 实时和任务后处理.....................................................................................................14 2.11 仰角和遮蔽角.....................................................................................................15 2.12 方位角.....................................................................................................................15 2.13 卫星可用性图.....................................................................................................16 2.14 天空图................................................................................................................................17 2.15 较差和较好的 GDOP ..............................................................................................................18 2.16 PDOP 图..............................................................................................................................19 2.17 常见错误.............................................................................................................................21 3.1 准确度和精密度.......................................................................................................................25 3.2 正态概率分布函数....................................................................................................25 3.3 GPS 相对准确度....................................................................................................................29 3.4 大地水准面和椭球体....................................................................................................................31 3.5 正高和椭球体高程之间的关系....................................................................................31 3.6 常规地面系统....................................................................................................................34 3.7 大地坐标系......................................................................................................................................35 5.1 GPS 项目阶段.................................................................................................................49 5.2 为达到所需水平精度建议采用的 GPS 技术.....................................................................50 5.3 代表性接收机成本,1992 年 1 月......................................................................................52 5.4 接收机选择要考虑的方面....................................................................................53 5.5 验证概念....................................................................................................................55 5.6 径向网络配置....................................................................................................................59
CMIP6 GCM每日降雨降雨
全球气候模型(GCM)是确定气候系统将如何响应的复杂工具。但是,GCM的输出具有粗分辨率,这不适合盆地级建模。全球气候模型需要以局部/盆地量表进行缩小,以确定气候变化对水文反应的影响。本研究试图评估如何使用Arti B CIAL神经网络(ANN),变更因子(CF),K-Neareast邻居(KNN)和多个线性回归(MLR)在印度35个不同位置的各种大规模预测变量如何在印度35个不同位置繁殖局部规模的降雨。根据相关值进行预测变量的选择。作为潜在的预测因子,空气温度,地理电位高度,风速分量和特定B C时相对湿度的相对湿度,选择了海平面压力。比较四种不同统计数据的繁殖,例如,在选定站点的每日降雨量的PDF估算的各种统计数据,如所选位置的平均值,标准偏差,分位数 - 分位数,累积分布函数和内核密度估计。CF方法在几乎所有站点上的其他方法都优于其他方法(R 2 = 0.92 - 0.99,RMSE = 1.37 - 28.88 mm,NSE = - 16.55 - 0.99)。这也与IMD数据的概率分布模式相似。

在抑制假性纳米结构的MOS2
伪电容剂是一类新兴的储能材料,在电池的能量密度与电动双层电容器的功率密度之间提供了有吸引力的折衷。降低电池材料的粒径和增加的表面积是引入假能映射行为和增加功率密度的常见方法。但是,在许多情况下,随着晶体尺寸的降低,还引入了未知范围的晶格障碍,因此很难解开大小和混乱对快速充电性能的相对贡献。在这项工作中,合成了一系列纳米结构的MOS 2结构,并具有不同的晶体大小和结晶度,以使大小和障碍对电荷/放电动力学的影响解散。通过总X射线散射实验和配对分布函数分析来量化每种材料中疾病的程度和类型。电化学表征,包括电静态速率能力,环状伏安法和各种动力学分析,用于证明既减小粒径又是引入晶格障碍都是增加电荷存储动力学的有效策略,并且效果是添加的。最后,Operando X射线衍射测量结果表明,可以使用大小和混乱抑制一阶LI互化诱导的相变,这是启用假能力电荷存储的关键特征。