XiaoMi-AI文件搜索系统
World File Search System加州理工学院
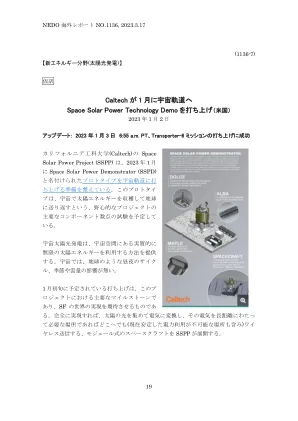

加州理工学院太空太阳能演示一号任务
瓦片是一种多层结构,两面都是光伏 (PV) 材料,PV 层下方有天线,还有一层承载 CMOS 集成电路,用于路由参考信号和定时,以控制天线的相位和直流到微波功率转换。瓦片具有将太阳能转换为微波能量并将该能量辐射到所需位置所需的所有功能。瓦片被制成长度从几米到 60 米不等的条带,然后将它们铺设到碳纤维结构中,该结构连接到展开装置上,而展开装置又连接到航天器上。碳纤维结构使条带可以折叠并卷入展开装置中,以便发射存放。我们目前的太空飞行器设计质量约为 430 公斤。发电站由许多太空飞行器组成,这些太空飞行器要么通过吊杆机械连接,要么自主编队飞行。SSPP 的中期目标之一是在太空中展示我们概念 [1] 的核心技术。通过验证技术在其设计运行环境中的性能以及展示系统内的功能接口正常运行,太空演示可以降低风险。我们设想进行一系列复杂程度不断增加的演示,以进一步增强对技术的设计和可扩展性的信心。我们的第一个这样的演示是空间太阳能演示一号(SSPD-1)。我们注意到最近有一个由 P. Jaffe [3] 领导的专门针对空间太阳能的太空演示。Jaffe 的“三明治”模块托管在美国空军 X-37B 太空飞机上,并在低地球轨道上运行了一年多。我们在 SSDP-1 开始时制定了几条基本规则。首先,有效载荷由三个独立的实验组成,以便可以单独测试每种技术。通过解耦如果我们要建造和飞行一个缩放的集成演示器时发生的依赖关系,我们可以验证核心技术的性能,而不会因相互依赖而产生潜在的混淆因素。其次,我们按照 NASA C/D 级任务标准 [4] 执行 SSPD-1 的开发、组装、集成和测试。我们的任务由技术目标(C 级)驱动,但我们的风险承受能力比其他级别(D 级)更高,复杂性相对较低(D 级),并且有程序约束(D 级)。作为 C/D 级任务运行,我们不必遵守任务更关键的有效载荷开发项目中的许多标准和 TOR,从而加快开发速度。我们仍然保持严格的测试
量子力学可以证伪吗? - 约翰·普雷斯基尔 - 加州理工学院
由于 QIS 的时间跨度长且本质上是跨学科的,因此其发展面临着特殊的问题。该领域的研究人员在传统学科的边缘工作,因此有时很难获得资金或发展自己的事业。最优秀的学生被 QIS 带来的兴奋所吸引,但他们不确定如何在传统的学术部门内追求这种兴趣。最令人担忧的是,那些通过 QIS 研究获得高级学位的优秀年轻科学家经常被迫离开该领域,因为缺乏稳定的资金来支持他们的工作……

封面 2007 年第 4 期.indd - 加州理工学院杂志
自太空时代开始以来,JPL 的太空飞船已经造访过太阳、月球和所有八大行星,有些甚至已经完全飞出太阳系。JPL 将旅行者号、伽利略号和卡西尼号送往外行星,将探测器送上火星,绘制金星云层覆盖的表面,并为尼尔·阿姆斯特朗在月球上迈出“一小步”铺平道路,而 JPL 最初是一个由和平主义者管理的军用火箭研究机构,而他当时只是想探索高层大气。加州理工学院喷气推进实验室非正式成立,当时航空学教授西奥多·冯·卡门 (Theodore von Kármán) 的研究生弗兰克·马利纳 (Frank Malina) [MS ME '35, MS AE '36, PhD '40] 和一些朋友在 1936 年在干河道中试射了一台火箭发动机。JPL 自 1958 年以来一直退出火箭业务,成为其成功开发美国第一颗卫星“探险者 1 号”的牺牲品。“探险者 1 号”是为回应 1957 年 10 月发射的 Sputnik 而发射的,Sputnik 标志着苏联对低地球轨道的主权。1957 年 8 月,世界上第一枚洲际弹道导弹(俄罗斯制造)发射升空,每隔 96 分钟就会飞过上空,斯普特尼克号提醒紧张不安的美国,核弹头也可以很容易地发射到那里。这是 JPL 从武器实验室到行星探测器的历程。
两个机构的故事——加州理工学院与亨廷顿的关系
Benzer 当时曾接受过加州理工学院常驻果蝇专家 Edward Lewis(现为托马斯·亨特·摩根生物学名誉教授)的果蝇技术培训,但他对此有不同的看法。果蝇产量高,易于饲养,而且不难饲养。此外,对于这种简单的生物来说,它们的行为方式相当丰富。直到 Benzer 和他的学生开始用诱变剂培养他们的标本,并研究从测试中散落出来的大量奇怪和退化的后代时,他才意识到这一点。当时的挑战是研究导致衰老的这些行为异常以及神经功能障碍,以及研究特定神经系统基因突变导致的这些功能障碍。Benzer 和他的合作者开发了实验和分析技术来完成精确的分析,正如 Crafoord 所说,“他和他的许多同事创造了一个新的非常成功的研究领域。”
![arXiv:2102.07039v1 [cs.RO] 2021 年 2 月 14 日 - 加州理工学院作者](/simg/2\25e43204245c78df627668556baf7f3f3d635b52.webp)
arXiv:2102.07039v1 [cs.RO] 2021 年 2 月 14 日 - 加州理工学院作者
摘要 — 实时、保证安全的轨迹规划对于未知环境中的导航至关重要。然而,实时导航算法通常会牺牲鲁棒性来换取计算速度。或者,可证明安全的轨迹规划往往计算量太大,无法进行实时重新规划。我们提出了 FaSTrack,即快速安全跟踪,这是一个既能实现实时重新规划又能保证安全的框架。在这个框架中,实时计算是通 过允许任何轨迹规划器使用系统的简化规划模型来实现的。该系统跟踪该规划,用一个更现实、更高维的跟踪模型来表示。我们预先计算了由于两个模型不匹配以及外部干扰而导致的跟踪误差界限 (TEB)。我们还获得了用于保持在 TEB 内的相应跟踪控制器。预计算不需要事先了解环境。我们展示了 FaSTrack 使用 Hamilton-Jacobi 可达性进行预计算,并使用三种不同的实时轨迹规划器和三种不同的跟踪规划模型对。
arXiv:2102.07039v1 [cs.RO] 2021 年 2 月 14 日 - 加州理工学院作者
摘要 — 实时、保证安全的轨迹规划对于未知环境中的导航至关重要。然而,实时导航算法通常会牺牲鲁棒性来换取计算速度。或者,可证明安全的轨迹规划往往计算量太大,无法进行实时重新规划。我们提出了 FaSTrack,即快速安全跟踪,这是一个既能实现实时重新规划又能保证安全的框架。在此框架中,通过允许任何轨迹规划器使用系统的简化规划模型来实现实时计算。该计划由系统跟踪,由更现实、更高维的跟踪模型表示。我们预先计算了由于两个模型不匹配以及外部干扰而导致的跟踪误差界限 (TEB)。我们还获得了用于保持在 TEB 内的相应跟踪控制器。预计算不需要事先了解环境。我们演示了使用 Hamilton-Jacobi 可达性进行预计算的 FaSTrack 和三个不同的实时轨迹规划器以及三个不同的跟踪规划模型对。

利益冲突政策
1.0 政策 加州理工学院的使命是通过与教育相结合的研究来扩展人类知识并造福社会。为了实现这一使命,加州理工学院遵守其行为准则,并努力实现最高水平的诚信和公众信任。加州理工学院的诚信取决于我们每个代表加州理工学院行事的人的个人诚信。加州理工学院(包括 JPL)致力于确保代表其做出的决定反映最高的道德标准,并确保其研究和教学保持严格和公开的调查,不受实际或想象的利益冲突的阻碍,这些利益冲突可能会影响其受托人、官员、高级管理人员、教职员工、学生、博士后学者、员工、JPL 员工和附属机构以及访客的合理判断。因此,我们每个人都有责任识别和解决个人利益与机构利益之间的冲突。我们每个人都必须以加州理工学院的最佳利益行事,并避免参与任何我们无法真诚地相信我们能够公平公正地行事的交易。个人和机构利益冲突可能会影响加州理工学院的董事、官员、教职员工、博士后学者、学生、工作人员、JPL 员工和附属机构以及访客。个人利益冲突是指由于直接或间接影响个人或家庭成员 1 的利益的关系,可能损害个人在开展加州理工学院业务时的个人判断和保持客观的能力的情况。机构利益冲突不同于个人利益冲突。当加州理工学院的研究、教学、推广或其他活动可能因加州理工学院持有的财务、商业或其他利益而受到损害时,就会发生机构利益冲突,这些利益可能会影响或似乎会影响相关的研究、教学、推广或其他加州理工学院活动。加州理工学院制定了适用于所有加州理工学院员工(包括教职员工)的利益冲突政策和程序,以确保遵守加州理工学院的道德标准以及管理学院活动的法律、规则和法规,同时培养和维持开放和诚信的环境。 2.0 个人利益冲突 任何存在实际或潜在利益冲突的情况都必须向加州理工学院充分披露,并在继续之前避免、充分管理或消除。利益冲突还包括承诺冲突,即外部活动(无论有偿还是无偿)干扰员工对加州理工学院的主要义务和承诺的情况。虽然每个人都应该注意避免承诺冲突,但有一些特殊考虑,包括要求披露外部活动、从属关系和任命,这可能适用于在加州理工学院进行联邦资助研究的人。联邦机构和私人研究赞助商都希望确保研究人员
加利福尼亚技术研究所...
a。本文档的目的是确定加州理工学院要求的标准和材料,以及在加州理工学院校园采用的典型设计和施工方法。应在所有项目开始时考虑这些标准,并根据每个项目的工作范围为适用。所有与这些标准的偏差应以书面形式提交给加州理工学院项目经理,并以偏差的理由提交。理由应解决加州理工学院的收益和总拥有成本。加州理工学院应以书面形式对偏差请求进行响应。设计(BOD)文档的基础,在设计过程中作为可交付的所有项目所要求的,应特别详细地介绍遵守指南。本文档不包含针对任何给定项目的所有要求。本文档中只包括加州理工学院具有共同偏好或特定方向的那些项目。例如,加州理工学院具有实验室案例工作的特定标准,因为这些是具有特定绩效要求和制造商的常见设施要求。