XiaoMi-AI文件搜索系统
World File Search System卡尔曼滤波
Wasserstein 分布稳健卡尔曼滤波
H ∞ 滤波器针对的是噪声过程统计数据不确定的情况,此时我们的目标是最小化最坏情况而不是估计误差的方差 [ 3 , 26 ]。该滤波器限制了将扰动映射到估计误差的传递函数的 H ∞ 范数。然而,在瞬态操作中,会失去所需的 H ∞ 性能,并且滤波器可能会发散,除非每次迭代中都有一些(通常是限制性的)正性条件成立。在集值估计中,扰动向量通过有界集(如椭球)建模 [ 4 , 22 ]。在该框架中,我们试图围绕与观测值和外生扰动椭球一致的状态估计构建最小椭球。然而,由此产生的稳健滤波器会忽略任何分布信息,因此倾向于过于保守。 [19] 首次研究了一种对更一般形式的(基于集合的)模型不确定性具有鲁棒性的滤波器。该滤波器以迭代方式最小化标准状态空间模型附近所有模型的最坏情况均方误差。虽然该滤波器在面对较大不确定性时表现良好,但在较小不确定性下可能过于保守。[25] 提出了一种广义卡尔曼滤波器,它可以解决这个缺点,在标准性能和最坏情况性能之间取得平衡。通过最小化矩生成函数而不是估计误差平方的均值,可以得到风险敏感的卡尔曼滤波器 [24]。这种风险敏感的卡尔曼滤波器等同于 [12] 中提出的分布鲁棒滤波器,它最小化标准分布周围的 Kullback-Leibler (KL) 球中所有联合状态-输出分布的最坏情况均方误差。 [27] 研究了更一般的 τ -散度球的扩展。


用于医学图像处理的卡尔曼布西滤波神经模糊图像去噪
推荐引用 推荐引用 G., Mohanapriya;Muthukumar S.;Santhosh Kumar S.;和 Shanmugapriya MM。“用于医学图像处理的卡尔曼布西滤波神经模糊图像去噪。”中智集合与系统 70, 1 (2024)。https://digitalrepository.unm.edu/nss_journal/vol70/iss1/19

基于集成卡尔曼滤波框架与机器学习算法的锂电池荷电状态估计
摘要:基于卡尔曼滤波(KF)框架和机器学习算法的电池等效电路模型荷电状态(SOC)估计研究相对有限,大部分研究仅针对少数几种机器学习算法,缺乏全面的分析比较,且大部分研究侧重于通过机器学习算法获取卡尔曼滤波框架算法模型的状态空间参数,再将状态空间参数代入卡尔曼滤波框架算法中进行SOC估计,此类算法耦合性强,复杂度高,实用性不强。本研究旨在将机器学习与卡尔曼滤波框架算法相结合,将五种卡尔曼滤波框架算法的输入、输出和中间变量值的不同组合作为六种主流机器学习算法的输入,估计最终的SOC。这六种主流机器学习算法包括:线性回归、支持向量回归、XGBoost、AdaBoost、随机森林、LSTM;算法耦合度较低,无需进行双向参数调整,且不涉及机器学习与卡尔曼滤波框架算法之间。结果表明,集成学习算法与纯卡尔曼滤波框架或机器学习算法相比,估计精度有显著提高。在各类集成算法中,随机森林与卡尔曼滤波框架的估计精度最高,且实时性好。因此,可以在各种工程应用中实现。


混杂生理信号的多元卡尔曼滤波回归用于 fNIRS 数据的实时分类
意义:功能性近红外光谱 (fNIRS) 是一种非侵入性技术,用于测量与神经功能相关的人体皮层血流动力学变化。由于其小型化潜力和相对较低的成本,fNIRS 已被提议用于脑机接口 (BCI) 等应用。与诱发神经活动产生的信号相比,大脑外生理产生的信号幅度相对较大,这使得实时 fNIRS 信号解释具有挑战性。通常使用结合生理相关辅助信号(例如短分离通道)的回归技术将脑血流动力学反应与信号中的混杂成分分离。然而,大脑外信号的耦合通常不是瞬时的,需要找到适当的延迟来优化干扰消除。
发现卡尔曼滤波器作为实用工具...
最初使用扰动方法的研究和上面提到的滤波器分解都是基于对标称(参考)轨迹的线性化,但很快就发现,对当前估计状态的重新线性化可能比以前使用的技术具有显著的优势。
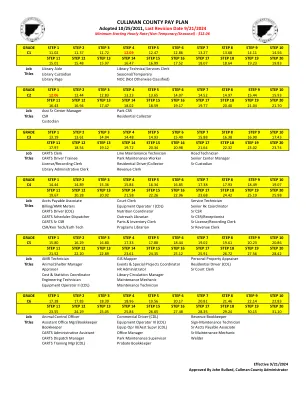
卡尔曼县支付计划
等级 步骤 1 步骤 2 步骤 3 步骤 4 步骤 5 步骤 6 步骤 7 步骤 8 步骤 9 步骤 10 C7 18.91 19.51 20.12 20.75 21.40 22.07 22.77 23.48 24.22 24.98 步骤 11 步骤 12 步骤 13 步骤 14 步骤 15 步骤 16 步骤 17 步骤 18 步骤 19 步骤 20 25.77 26.57 27.41 28.27 29.16 30.07 31.02 31.99 33.00 34.03 职位 行政助理/办公室经理 EMA 专家 项目协调员 职称 助理图书馆馆长 工程助理 道路施工队队长 (CDL) 助理系统操作员 政府税务分析师 固体废物官员 桥梁建设技术员 (CDL)库存/采购代理 高级估价师 桥梁建设技术员/助理主管 (CDL) 营销/活动协调员 高级 GIS 测绘员 区域管理协调员 机械师-车库 高级个人道具估价师 选举协调员 办公室和零件采购经理
