XiaoMi-AI文件搜索系统
World File Search System压电

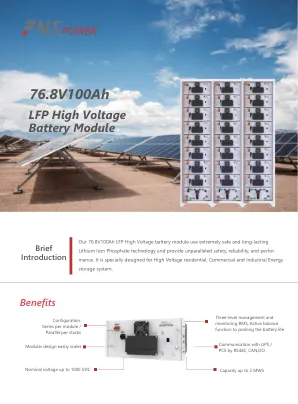
VentPlus 高压电池系统通风装置
为了提高安全性,新法规将强制要求原始设备制造商确保在火灾或爆炸发生前五分钟内乘客可以安全离开车辆 热气颗粒过滤器是一种通过过滤防止热失控事件中产生的颗粒从电池组排出的方法 通过这种方式,可以降低金属火花点燃电池组外部排气的风险

使用压电传感器发电
I.介绍在当今世界上一切都变成了数字,任何数字设备都需要直流电源进行工作。有些使用电池,有些使用电源。但是,这个世界上有一些可再生资源,例如太阳能,风能,水电。以这种方式,另一个发电机已经来了,但尚不知道所有人。是压电发电机。自远古以来,人类一直需要并以越来越多的速度来使用能量。由于这一数字,许多能源资源已经用尽并浪费了。提议使用人类运动利用脚足动力的废物能量非常相关,对于像印度这样的人口稠密的国家,火车站,寺庙等在整个时钟都拥挤。用压电技术设计地板时,压力产生的电能将由地板传感器捕获,并由压电传感器转换为电荷,然后存储并用作电源。,此电源在农业,家庭应用和街道照明中具有许多应用程序,并且是偏远位置的传感器的能源。本文是关于当人们在地板上行走时发电。考虑一下您行走时浪费的力量。这个想法是将重量能量转换为电能,发电地板打算转移动力学

产品安全召回N2222380031不当尿电烷密封 - 高压电池组
重要:这些高压电池的运输受危险货物运输法的监管。GM经销商零件和配件政策和程序要求经销商遵守所有适用的危险货物运输法,包括但不限于至少有一名员工按照法律要求在危险货物运输中认证。在最新版本的服务公告#99-00-89-019中,可以找到危险货物运输的其他资源。作为记录的托运人,经销商负责遵守所有适用的国际,联邦,州,省或当地危险货物运输法。这包括但不限于适当的标签,标记,运输纸的完成和包装。不遵守联邦危险货物运输法可能会导致违反美国的行为修订的危险材料运输法及其由美国发布的实施法规点,每种违规行为的罚款最高为89,678美元,除非最高罚款为209,249美元,如果违规行为造成死亡,严重疾病或严重伤害,任何人或财产的实质性破坏。

超低模式的设计压电量量子传感器
摘要:量子状态从微波炉到光学结构域的相干转导可以在量子网络和分布式量子计算中起关键作用。我们介绍了在硅平台上的混合锂锂锂中形成的压电机电设备的设计,该设备适用于微波至光学量子转导。我们的设计基于具有光力学晶体腔的超低模式压电腔的声学杂交。Niobate锂的强压电性质使我们能够通过声学模式介导转导,该声学模式仅与硝酸锂相互作用,并且主要是硅状的,并且具有非常低的电气和声学损失。我们估计,该传感器可以实现<0的固有转换效率高达35%。5添加噪声量子量当与超导式的transmon值偶联并以10 kHz的重复速率以脉冲模式运行时,添加了噪声量子。在这种混合锂硅硅酸盐透射剂中获得的性能改善使其适合通过光学纤维链路连接的超导量子处理器之间的量子纠缠。

高性能的底层纤维电离和压电纳米生成剂
1马德里材料科学研究所(ICMM)。 janon14 @@ ucm.s(J.G.); hamorin@icmm.sic.s(H.A.)。材料,葡萄牙大街大学; vanovmaximem@ua.p.p); pcferreira@ua。); Paula* B.W.智能系统组。

数据表:ZCS低压电池
*为了确保最高性能,建议在15°C和40°C之间的受控温度环境中安装(低于15°C以下电池,电池通过限制充电电流和低于0°C的电池停止充电来保护自己电池的条件以及电池连接的逆变器。请参阅逆变器数据表,以进行实际充电和排放电流
BQ25798 I2C受控,1至4个电池,5-A降压电池充电器,带有双输入选择器,太阳能电池板的MPPT和快速备份模式数据表(Rev. b)
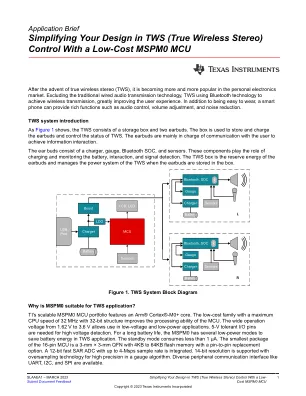
Ti的可扩展MSPM0 MCU投资组合具有ARM®Cortex®-M0+核心。最大CPU速度为32 MHz的低成本家族具有32位结构,可提高MCU的处理能力。从1.62 V到3.6 V的宽操作电压允许在低压和低功率应用中使用。高压检测需要 5-V耐受I/O销。 在较长的电池寿命中,MSPM0具有多种低功率模式,可在TWS应用中节省电池能量。 待机模式的消耗小于1 µA。 16针MCU的最小包装是一个3毫米×3毫米QFN,具有4KB至64KB闪存,并具有销钉对针替换选项。 集成了一个12位的快速SAR ADC,最高为4-MSPS样本率。 14位分辨率通过高精度的高度采样技术支持,以量表算法的高精度。 可以使用UART,I2C和SPI等各种外围通信界面。5-V耐受I/O销。在较长的电池寿命中,MSPM0具有多种低功率模式,可在TWS应用中节省电池能量。待机模式的消耗小于1 µA。16针MCU的最小包装是一个3毫米×3毫米QFN,具有4KB至64KB闪存,并具有销钉对针替换选项。集成了一个12位的快速SAR ADC,最高为4-MSPS样本率。14位分辨率通过高精度的高度采样技术支持,以量表算法的高精度。可以使用UART,I2C和SPI等各种外围通信界面。

灵活的压电/自pacacivel Hybrid Force和接口传感器与接口协作机器人
摘要 - 力和接近传感器是机器人技术的关键,尤其是在与人类在实际非结构化环境中与人进行物理或认知互动的协作机器人应用时。但是,用于机器人技术的大多数现有传感器都受到以下限制:1)它们的范围,测量单个参数/事件,并且通常需要多种类型的传感器; 2)制造昂贵,将它们的用途限制为严格必要的,并且通常会损害冗余; 3)具有无效或降低的物理灵活性,需要适应各种机器人结构的进一步成本。本文提出了一种基于压抑和自态现象的新型机械功能和接近杂种传感器。传感器即使在复杂形的机器人结构上,传感器也易于应用。描述了制造过程,包括控制电路,机械设计和数据采集。具有传感器表征的实验性三个体系,重点是力 - 电阻和自paCaCaCACIAL距离响应。传感器的多功能性,灵活性,薄度(厚度为1毫米),准确性(降低的漂移)和可重复性证明了其在多个域中的适用性。最后,传感器在两种不同的情况下成功地介绍了:手工引导机器人(通过触摸命令)和人类 - 机器人碰撞避免(通过接近性检测)。

设计和分析的混合位移放大器支持高性能压电分配器
摘要:在这项研究中,由压电堆栈供电的合规放大器旨在满足高性能分配操作要求。通过研究传统的桥梁型放大器机制的低频带宽问题,我们提出了一种位移放大器机制,混合桥梁 - 桥桥(HBLB),从而通过结合传统的桥梁型和杠杆机制来增强其动态性能。添加引导梁,以进一步提高其输出刚度,并保证了较大的放大比。已经开发出一种分析模型来描述HBLB机制的完整弹性变形行为,该机制考虑了输入末端的横向位移损失,然后通过有限元分析(FEA)进行验证。结果表明,HBLB的工作原理使用有限元方法优化了结构参数。最后,为性能测试制造了位移放大器的原型。静态和动态测试结果表明,所提出的机制可以达到223.2 µm的行进范围,并且频率带宽为1.184 kHz,它符合高性能压电射击器的要求。