XiaoMi-AI文件搜索系统
World File Search System双边

有效的双边跨模式群集匹配无监督的可见红外人Reid
无监督的可见红外人员重新识别(USL-VI-REID)旨在匹配来自不同方式的同一身份的行人图像,而无需注释。现有作品主要集中于通过对齐未标记的样本的实例级特征来减轻模式差距。但是,跨模式簇之间的关系尚未得到很好的探索。为此,我们提出了一个新型的双边群集匹配的学习框架,以通过匹配的跨模式簇来弥补模态差距。特定的是,我们通过优化两部分图中的最大匹配问题来设计多到多的双边跨模式群匹配(MBCCM)算法。然后,匹配的成对簇在模型训练过程中利用共享的可见和红外伪标签。在这样的监督信号下,提出了一种特异性和模态性和情态的(MSMA)对比度学习框架 - 提议在集群级别上共同对齐特征。平均值,提出了交叉模式一致性约束(CC),以明确减少较大的模态差异。对公共SYSU-MM01和REGDB数据集进行了广泛的实验,证明了该方法的有效性,平均超过8.76%的地图超过了最先进的方法。
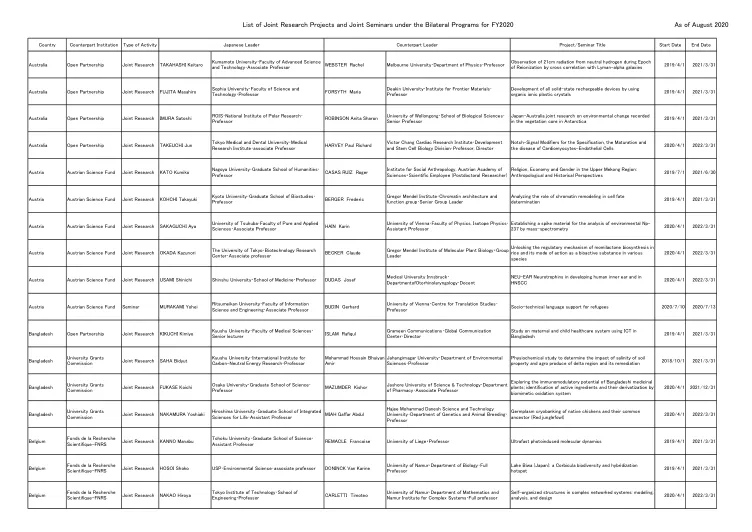
截至2020年8月的双边计划下的联合研究项目和联合研讨会列表
澳大利亚开放伙伴关系联合研究高桥keitaro kumamoto University ・高级科学与技术学院・副教授韦伯斯特·雷切斯特·雷切斯特·瑞秋·墨尔本大学・物理学系・物理学系教授观察21cm辐射在与莱曼 - 阿尔帕·阿拉克斯(Lyman-Alpha Galaxies)的交叉相关期间,在返回期间的中性氢中的21cm辐射。

HIV感染的空间生物学与气候相关的双边官方发展援助(...
1海洋政策研究所,日本东京萨萨川和平基金会,2 2号卫生政策与管理部,日本东京,凯奥大学医学院研究生院,日本东京,3个全球卫生政策系,东京大学医学研究生院,东京大学,日本东京大学,日本,日本4号,日本全球疾病中心,日本全球医学中心,4个伦敦卫生和热带医学学院,伦敦,英国,英国7学院,热带医学和全球健康学院,纳加萨基大学,日本纳加萨崎,传染病流行病学系8号,伦敦纳加萨崎,伦敦,伦敦州立大学教职员工,伦敦居民,伦敦,唐纳(don)德国,日本东京10更好的共同居民,日本东京凯奥大学(KGRI)11 KEIO大学全球研究所(KGRI)
超越会员制:竞争环境下双边平台市场进入策略的模拟研究
组织需要实施适当的市场进入策略,才能成功建立双边数字平台。如果目标市场中已经存在竞争平台,遵循正确的策略就变得更加重要。在这种情况下,组织将发现更难达到临界规模,因为由于网络效应,用户会涌向已经建立的更大的平台,这将导致潜在的赢家通吃局面。虽然以前的研究提出了一些策略,但并没有讨论如何找到正确的策略。本文介绍了一种基于代理的市场模拟,以全面评估竞争下的替代策略,该策略不仅考虑了进入者的平台采用,还考虑了交易、收益以及削弱现有企业的需要。通过一个用实证数据参数化的示例案例,我说明了如何应用该模型。研究结果表明,进入者需要全面评估市场进入策略,而不仅仅是关注会员人数,因为不同的策略在发展进入者的平台、削弱现有企业以及提高进入者的交易和收益方面最有希望。
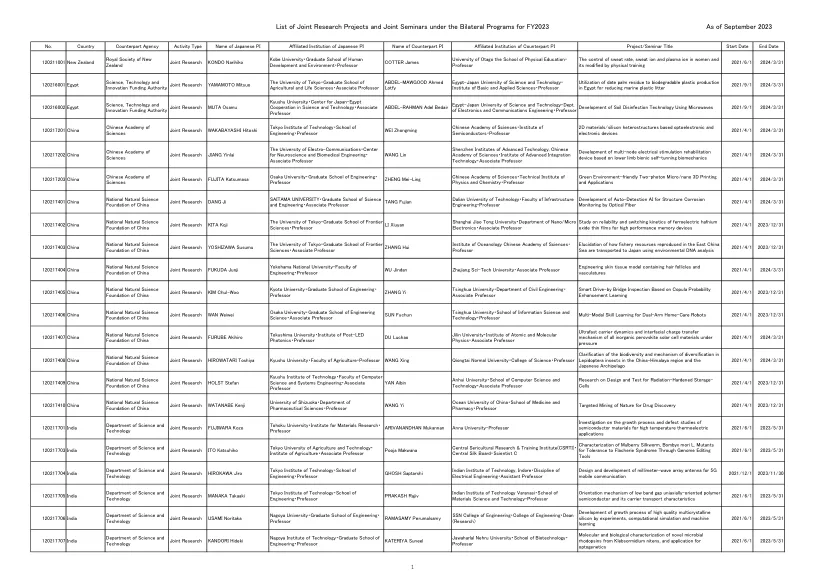
截至2023年9月的双边计划下的联合研究项目和联合研讨会列表
120228810韩国韩国国家研究基金会联合研究Hirasawa Akira冈山大学・医学,牙科和药学学院・教授Lee Jeong-won Samsung Samsung Medical Center ・教授・医学中心・博士,医学,妇产科研究生院2024/3/31120228810韩国韩国国家研究基金会联合研究Hirasawa Akira冈山大学・医学,牙科和药学学院・教授Lee Jeong-won Samsung Samsung Medical Center ・教授・医学中心・博士,医学,妇产科研究生院2024/3/31

dabi:使用图像的基于双边控制的模仿学习对数据增强方法的评估
摘要 - 自主机器人操纵是一个复杂且不断发展的机器人领域。本文着重于模仿学习中的数据增强方法。模仿学习包括三个阶段:从专家那里收集数据,学习模型和执行。但是,收集专家数据需要手动努力,并且耗时。此外,由于传感器具有不同的数据采集间隔,因此需要进行预处理,例如降采样以匹配最低频率。下采样可实现数据的增加,还有助于机器人操作的稳定。鉴于此背景,本文提出了使用称为“ dabi”的图像的基于双边控制的模仿学习的数据增强方法。Dabi以1000 Hz收集机器人关节角,速度和扭矩,并使用以100 Hz捕获的Gripper和环境相机的图像作为数据增强的基础。这可以使数据增加十倍。在本文中,我们仅收集了5个专家演示数据集。,我们使用非构成数据集和两种增强方法训练了双边对照模型,用于比较实验并进行了现实世界实验。结果证实了成功率的显着提高,从而证明了达比的有效性。有关其他材料,请检查:https://mertcookimg.github.io/dabi

加强欧盟与巴西在半导体领域技术的双边知识以及贸易和研发合作的可能性
3 委员会批准 14 个成员国为欧洲共同利益重要项目提供高达 81 亿欧元的公共支持,项目领域为微电子和通信技术;https://ec.europa.eu/commission/presscorner/detail/en/ip_23_3087

运动阶段条件的差异和在双边触摸任务期间时间同步和延续的感觉输入
在感觉运动同步(同步和连续敲击)任务中,受试者将其四肢与以各种节奏呈现的等质色调同步移动,并在音调停止后继续以相同的速度敲击。我们研究了双侧下肢电动机控制执行此任务的能力,作为检查与人类运动相关的运动配位的关键指标,例如步行。在这里,认为听觉和触觉输入等感官信息可以提高感觉运动同步的准确性。在这项研究中,我们探讨了在存在或不存在感觉信息的情况下,双侧下肢的节奏运动控制变化的变化。三十三名健康的志愿者执行了三种类型的脚敲击任务:同步 - 碰撞(SC- TAP),敲击(A-TAP)和两者的组合(SCA-TAP)。参与者被指示在500至4,800毫秒之间以固定的间隔间隔(ISIS)(ISIS)呈现的音调同步点击脚开关(或在A-TAP中执行类似的运动)。用单侧脚或双侧运动,两脚(同时)或交替进行双侧运动(反相)进行水龙头。评估了同步敲击误差和TAP间间隔(ITI)。在反相条件下,ITI的变异系数(CV)明显小于SC-TAP和SCA-TAP任务中的单侧或同相条件。此外,考虑到两侧的水龙头时间,仅在SC-TAP任务中,反相的CV明显降低。调查结果表明,反相条件在重复的下肢运动中表现出较高的时间稳定性。当考虑到反相运动中的音调未表现的节奏肢体运动的稳定性时,这些发现还强调了脚底的触觉反馈意义。
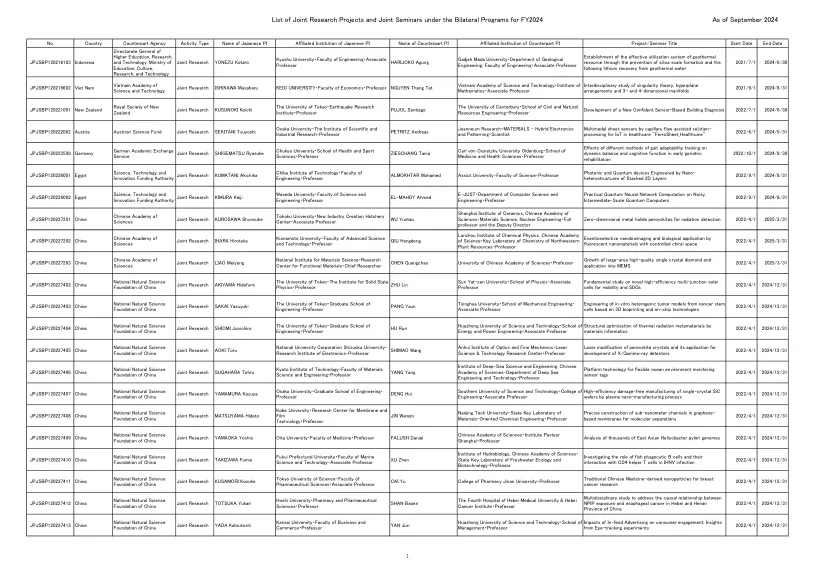
2024 财年双边项目下的联合研究项目和联合研讨会清单(截至 2024 年 9 月)
JPJSBP120237901 印度 印度社会科学研究理事会 共同研究 CHAKRABORTY 沙米克 富山大学・社会科学学院・副教授 CHATTERJEE Amit 维斯瓦巴拉蒂大学・副教授 利用传统和当地知识以及公民科学恢复和保护城市附近湿地 2023/9/1 2024/8/31
生成网络建模揭示了整个昆虫大脑连接组表现出的双边对称性的定量定义
抽象比较连接组可以帮助解释神经连通性与遗传学,疾病,发展,学习和行为的关系。然而,对两个网络之间差异的重要性和性质进行统计推断是一个开放问题,并且这种分析尚未广泛应用于纳米级连接组。在这里,我们通过案例研究对幼虫果蝇脑连接组的双边对称性进行研究。我们将“双边对称性”的概念转化为左和右半球网络结构的生成模型,从而使我们能够测试和完善对对称性的理解。我们发现在整个左和右网络以及特定细胞类型之间的连接概率上存在显着差异。通过重新缩放连接概率或根据重量去除某些边缘,我们还提出了该连接表所表现出的双边对称性的调整定义。这项工作表明了网络的统计推断如何为连接组的研究提供信息,从而促进神经结构的未来比较。