XiaoMi-AI文件搜索系统
World File Search System双频

免提麻醉:靶控输液系统
1. 简介 每种药物输送方式的目标都是实现并维持药物疗效的治疗时间过程,同时避免副作用。静脉 (IV) 药物通常使用标准剂量指南,以推注剂量或连续输注的方式给药。推注剂量通常用手持注射器给药,输注用输液泵给药。纳入剂量计算的唯一患者协变量是体重,而年龄、性别、肌酐清除率等其他参数经常被忽略,因为在给药时这些协变量之间存在复杂的数学关系。靶控输注 (TCI) 是一种输注 IV 药物的技术,以在特定的身体部位或感兴趣的组织中实现用户定义的、预测的(“目标”)药物浓度。TCI 系统可以根据需要快速滴定反应,可以轻松改变麻醉深度,并在需要时保持稳定的浓度。对临床医生的潜在好处是更精确地滴定麻醉药物的效果。还可以指示 TCI 系统超过血浆中所需的浓度,以加速药物作用的开始速度。(1,2)当使用针对特定药物的药代动力学衍生模型时,TCI 系统会结合患者的特征(体重、身高、年龄、性别和其他生物标志物)来实现目标血清浓度,同时允许临床医生根据临床或生理(双频指数监测)指标进行更改。(3)靶控输注 (TCI) 系统现在用作标准化输注系统,也是常规麻醉技术的一部分 2. 历史 1919 年,Widmark 使用恒定速率和采用单室动力学的药物一级消除描述了在恒定速率输注过程中体内积累药量的动力学。1968 年,Kruger-Thiemer 发表了一种数学方法,用于计算输注速率以达到并维持应用于 2 个或更多室的药物的稳态血药浓度。他们的药代动力学模型可用于设计有效的剂量方案,应用推注、消除、转移 (BET) 方案,该方案包括计算以填充中心(血液)隔室的推注剂量、等于消除率的恒定速率输注,以及

多频稳态视觉诱发电位脑机接口的频率集选择
稳态视觉诱发电位 (SSVEP) 是一种与周期性视觉刺激频率锁定的大脑活动( Zander 等人,2009 年)。与其他模式(例如运动想象 (Nicolas-Alonso and Gomez-Gil, 2012))相比,SSVEP 具有相对较高的准确度和信息传输率,并且对用户所需的培训最少,因此被广泛应用于脑机接口 (BCI) 中。标准的基于 SSVEP 的 BCI 在工作空间中包含多个刺激,每个刺激以不同的频率闪烁,而脑电图 (EEG) 主要从枕叶测量。测得的 EEG 反映了用户视觉上关注的刺激的频率,以及该频率的谐波。谐波的存在为解码过程提供了更多的参考点,但也给基于 SSVEP 的 BCI 的设计带来了额外的复杂性和挑战。例如,如果同一个 BCI 中对两个不同的刺激同时使用某个频率及其谐波,那么在记录的这两个刺激的脑电图中就会有共同的频率,这可能会混淆解码算法。因此,在文献中,一些研究有意避免在刺激中使用具有共同谐波的频率(Volosyak 等,2009;Chen 等,2015)。这个谐波问题,加上人脑对周期性视觉刺激的响应频率范围有限(Regan,1989),限制了标准基于 SSVEP 的 BCI 中可使用的唯一频率的数量;即,低信噪比脑电图记录和小的频率分离会损害解码性能。因此,在需要大量唯一频率来标记所有目标的场景中使用标准基于 SSVEP 的 BCI 具有挑战性。为了解决这个问题,已经引入了多频刺激方法,在每个刺激中使用多个频率,其中两个频率(双频)是最广泛使用的模态(Shyu 等,2010;Zhang 等,2012;Chen 等,2013;Hwang 等,2013;Kimura 等,2013;Chang 等,2014;Mu 等,2021a)。然而,这些研究主要集中于介绍多频刺激方法,并没有探讨频率选择方法。随着用于标记每个目标的频率数量的增加,在每个刺激或目标上使用多个频率可以成倍增加可以在工作空间中表示的目标数量。多频刺激产生复杂的周期性刺激信号,从而触发更复杂的 SSVEP 反应。在 Mu 等人的研究中, (2021a)表明,多频率 SSVEP 响应不仅包含输入频率及其谐波,还包含输入频率的整数线性组合,这些组合具有在记录的 SSVEP 中更可能观察到的低阶相互作用。注意,相互作用的顺序定义为
WAAS 性能标准 - GPS
美国全球定位系统 (GPS) 标准定位服务 (SPS) 由绕地球运行的航天器产生的空间定位、导航和授时 (PNT) 信号组成,这些信号免费提供给全球民用、商业和科学用途。广域增强系统 (WAAS) 为 GPS 提供增强信号,免费提供给用户,该信号提供校正和完整性信息,旨在改善美国 (U.S.) 和加拿大和墨西哥部分地区的定位导航和授时 (PNT) 服务。WAAS 是符合国际民用航空组织 (ICAO) 标准的天基增强系统 (SBAS) 的首次运营实施。此 WAAS 性能标准 (WAAS PS) 指定了使用 GPS SPS 广播信号和 WAAS 增强信号的适当装备用户可用的导航性能级别。美国政府致力于满足本 WAAS PS 中规定的最低服务水平。有关 USG 对 GPS SPS 承诺的具体信息,请参阅 GPS SPS PS。自 WAAS 于 2003 年投入使用以来,实际性能通常达到并超过了本 WAAS PS 中规定的最低准确性、完整性、连续性和可用性性能要求,因此用户通常可以期望性能高于此处描述的最低水平。美国联邦航空管理局 (FAA) 在线提供实际实时性能、统计性能和实时数据。GPS 和 WAAS 的季度性能分析报告也可在 FAA 技术中心 WAAS 测试平台网站 ( http://www.nstb.tc.faa.gov/ ) 上找到。有兴趣的读者可以参考此网站和其他来源,了解最新的 GPS 和 WAAS 性能信息。请注意,基于 WAAS 的垂直定位器性能 (LPV) 引导程序的数量现已超过美国的仪表着陆系统 (ILS) 程序的数量。GPS 未来将提供三种新的现代化民用信号:L2C、L5 和 L1C。借助 L5 上的附加信号,机载接收器将能够校正视线电离层传播延迟误差。这种双频 (L1/L5) 操作模式将允许对基于 GPS 的增强服务(例如 WAAS)的交付进行更改,但本性能标准不考虑这些未来的变化。此 WAAS 性能标准仅适用于 L1 (1575.42 MHz) 粗/捕获 (C/A) 信号和地球静止卫星 (GEO) 广播的 WAAS 空间信号 (SIS) 的 WAAS 增强型 GPS SPS 用户。WAAS PS 将根据需要进行更新,以反映 WAAS 增强服务的重大变化。除了 WAAS PS,读者还可以参考 GPS SPS PS 和 FAA 技术标准命令 (TSO)-145/146,以了解基本 GPS SPS 服务和 WAAS 接收器设备的详细信息。WAAS 还符合或超过了 ICAO 附件 10,全球导航卫星系统 (GNSS) 卫星增强系统 (SBAS) 的标准和建议做法 (SARP)。
WAAS 性能标准 - GPS
美国全球定位系统 (GPS) 标准定位服务 (SPS) 由绕地球运行的航天器产生的空间定位、导航和授时 (PNT) 信号组成,这些信号免费提供给全球民用、商业和科学用途。广域增强系统 (WAAS) 为 GPS 提供增强信号,免费提供给用户,该信号提供校正和完整性信息,旨在改善美国 (U.S.) 和加拿大和墨西哥部分地区的定位导航和授时 (PNT) 服务。WAAS 是符合国际民用航空组织 (ICAO) 标准的天基增强系统 (SBAS) 的首次运营实施。此 WAAS 性能标准 (WAAS PS) 指定了使用 GPS SPS 广播信号和 WAAS 增强信号的适当装备用户可用的导航性能级别。美国政府致力于满足本 WAAS PS 中规定的最低服务水平。有关 USG 对 GPS SPS 承诺的具体信息,请参阅 GPS SPS PS。自 WAAS 于 2003 年投入使用以来,实际性能通常达到并超过了本 WAAS PS 中规定的最低准确性、完整性、连续性和可用性性能要求,因此用户通常可以期望性能高于此处描述的最低水平。美国联邦航空管理局 (FAA) 在线提供实际实时性能、统计性能和实时数据。GPS 和 WAAS 的季度性能分析报告也可在 FAA 技术中心 WAAS 测试平台网站 ( http://www.nstb.tc.faa.gov/ ) 上找到。有兴趣的读者可以参考此网站和其他来源,了解最新的 GPS 和 WAAS 性能信息。请注意,基于 WAAS 的垂直定位器性能 (LPV) 引导程序的数量现已超过美国的仪表着陆系统 (ILS) 程序的数量。GPS 未来将提供三种新的现代化民用信号:L2C、L5 和 L1C。借助 L5 上的附加信号,机载接收器将能够校正视线电离层传播延迟误差。这种双频 (L1/L5) 操作模式将允许对基于 GPS 的增强服务(例如 WAAS)的交付进行更改,但本性能标准不考虑这些未来的变化。此 WAAS 性能标准仅适用于 L1 (1575.42 MHz) 粗/捕获 (C/A) 信号和地球静止卫星 (GEO) 广播的 WAAS 空间信号 (SIS) 的 WAAS 增强型 GPS SPS 用户。WAAS PS 将根据需要进行更新,以反映 WAAS 增强服务的重大变化。除了 WAAS PS,读者还可以参考 GPS SPS PS 和 FAA 技术标准命令 (TSO)-145/146,以了解基本 GPS SPS 服务和 WAAS 接收器设备的详细信息。WAAS 还符合或超过了 ICAO 附件 10,全球导航卫星系统 (GNSS) 卫星增强系统 (SBAS) 的标准和建议做法 (SARP)。
navila_paper.pdf
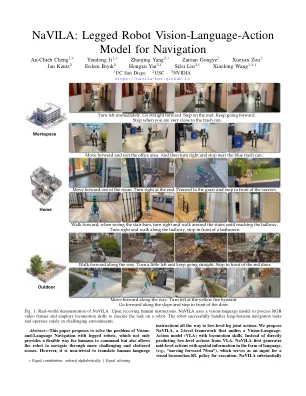
执行视觉和语言导航(VLN)的能力已成为现代机器人系统中的基础组成部分。使用VLN,一个机器人有望根据语言说明[1-6]在没有提供的地图的情况下在看不见的环境周围导航。这不仅为人类提供了更好的相互作用,而且还通过语言加强了跨场所的概括。在本文中,我们通过腿部机器人(例如四倍或人形生物)进一步扩展了VLN的研究。使用腿而不是轮子可以使机器人在更具挑战性和混乱的场景中导航。如图1,我们的机器人可以在狭窄的人行道上浏览一个凌乱的实验室空间,从房屋中的房间过渡到房间,以及解决户外挑战性的环境,例如带有小岩石,孔和槽的不均匀地形。要将语言转换为动作,机器人需要对输入语言进行推理,并执行闭环计划以及低级控制。随着大语言模型(LLM)和视觉模型(VLM)的最新进展,已经开发了几个端到端视觉语言动作(VLA)系统[7-9]。这些系统对具有大规模的机器人操纵演示的通用Propose VLM微调,以产生低级动作。虽然在单个模型中统一推理和执行令人着迷,并且表现出令人鼓舞的结果,但值得深入研究以下问题:是否有更好的方法来代表量化的低级命令以外的动作?毕竟,LLM和VLM主要接受了自然语言的培训。当我们需要将推理转换为精确的非语言行动时,统一推理和执行变得具有挑战性。受到VLM [10,11]的最新进展的启发,我们提出了纳维拉(Navila)的提议,这是一个针对腿部机器人VLN的两个级别框架:VLM的两级框架,可以很好地输出中级动作(VLA),以“右转30度”的策略,以及训练的范围,以“转向30度”。VLA的中级动作输出无需低级命令传达位置和方向信息。该框架的优点是三个方面:(i)通过将低级执行与VLA分解,可以通过交换低级策略来在不同的机器人上应用相同的VLA; (ii)将动作表示为中级语言指令,可以通过不同的数据源进行VLA培训,包括真实的人类视频和推理质量检查任务。这可以增强推理功能,而不会过度拟合特定的低级命令,并可以利用现实世界数据进行概括; (iii)Navila在两个不同的时间尺度上运行:VLA通常是一个大型且计算密集的模型,以较低的频率运行,提供高级导航命令;运动策略实时运行。这种双频方法允许