XiaoMi-AI文件搜索系统
World File Search System变形的
研究局部光子退火对硅晶片中应力的影响
使用三重晶体X射线衍射研究了光子退火对硼掺杂CZ-SI晶状体晶体结构中变形的影响。具有卤素灯灯(光子退火模式)和快速热退火的双面抛光硅晶片的整个表面的常规退火产生压缩变形。在相对较低的晶圆温度下(小于55°C),使用特殊的光电板将多个分离的晶圆区域(局部光子退火模式)提供局部退火,可产生拉伸变形。但是,如果退火晶片的反向侧面包含机械固定层,则不会观察到这种效果。已经提出了一种解释实验结果的机制,可用于合成光电转换器结构中的电荷泵。

安慰剂效应和理论上下文
安慰剂一词是拉丁动词放置的共轭,这意味着请满足。 div>第二次世界大战后,安慰剂效应强烈爆发了亨利·比彻(Henry Beecher)的文章《强大安慰剂》(The Power-Ful Altbo),于755年发表在《贾马杂志》上。Beecher在战争期间参加了受伤的士兵。 div>观察到,在其中一些,可以用盐溶液缓解疼痛,并产生类似于变形的作用。 div>35%的患者对安慰剂治疗做出了积极反应1。 div>Beecher在安慰剂上的作品是现代医学时代的开始,随机临床试验代表了评估干预效率的黄金标准。 div>但是,比彻(Beecher)高估了安慰剂效应,因为他没有将其与其他偏见或混乱因素(例如疾病或回归到平均值的自然演变)区分开来。 div>

通过触觉反馈和预训练的对象表示自适应接触式操纵
摘要 - 在基于学习的接触任务中,由于演示数据有限以及培训和部署条件之间的差距,仔细的力控制对于适应环境变化至关重要。这在擦拭任务中尤其重要,因为操纵柔软和可变形的物体(例如,海绵),在擦拭表面高度和海绵特性中,需要适应力的适应力。为了解决此问题,我们介绍了一种将实时触觉反馈与预训练的对象表示结合的方法,从而使机器人能够适应未看到的表面高度和对象属性。在实际硬件上进行了测试,该方法通过分析力轨迹,展示了适应性的显着进步,成功地适应了操纵环境的变化。索引术语 - 摄像模仿学习,基于力的接触 - 富含富含力的操纵,对象表示

优化机器人手臂性能:与尼龙,PLA和ABS Prashant Kumar 1,*,P。K. Sharma 2,Ishan Khan 3
摘要本文分析了在机器人臂中使用的三种材料的机械行为:尼龙,PLA和ABS,重点是三个重要参数:在不同加载条件下的总变形和等效应力。在这方面,通过ANSYS软件进行了有限元分析,以模拟结构刚度,以及它们抵抗用钢加固增强时这些材料会产生的压力的阻力。调查表明,与PLA和ABS相比,尼龙的性能,尤其是在用钢增强的情况下,就可变形性和在应力分布中扩散而言。因此,它更适用于应用负载时包括更高耐久性以及最小变形的应用程序。一般设计和分析应表明在工业和教育机构中使用的小规模机器人武器的设计中有一些有价值的见解。关键字:ABS,ANSYS,等效压力,FEA,材料性能,尼龙,PLA,机器人臂,钢筋,钢筋,总变形简介

用PMMA基质制成的各种复合材料制成的运动假肢的性能:数值和理论研究
假肢升级是专门的假肢,使患者能够参加更苛刻的娱乐活动,例如跑步。本研究检查了假肢的使用,特别是运动假肢。目前的研究着重于样品的制造和生产特性,由基于多种纤维(UHMWPE,Perlon,Perlon,Carbon纤维和玻璃纤维)增强的聚甲基丙烯酸酯树脂(PMMA)制成的运动假体脚。有限元方法(ANSYS-19R)用于构建运动假体模型,并应用边界条件来研究变形和存储能量对运动假肢性能的影响。已经制造了六个层压板,并且发现在UHMWPE中添加多个碳纤维层对变形的影响比添加玻璃纤维改善的影响更好。此外,研究结果表明,当类的数量增加一倍时,性能会有所改善,因为在同一边界条件下,添加碳纤维的层压板之间的改善速率为31%。
用于靶向治疗的可变形软磁微型机器人的建模与表征
摘要 — 磁性纳米粒子 (MNP) 在许多生物医学应用中是非常有吸引力的组件,特别是作为用于靶向治疗的治疗性磁性微载体 (TMMC)。虽然可以使用外部磁场有效地收集和运输 MNP,但最佳输送方式尚未得到充分研究。在本文中,我们讨论了可变形软磁微型机器人在不同磁场条件下的建模和特性描述。所考虑的微型机器人由浸入不同载体流体中的超顺磁性氧化铁 (SPIO) 组成,并且已经在弱磁场下通过实验表征了其行为。实验结果清楚地表明,观察结果正确地遵循了模型预测。具有可控形状变形的软磁微型机器人由于其特性对环境条件(例如容器尺寸、速度、剪切应力)的适应性而具有巨大的靶向药物输送潜力。
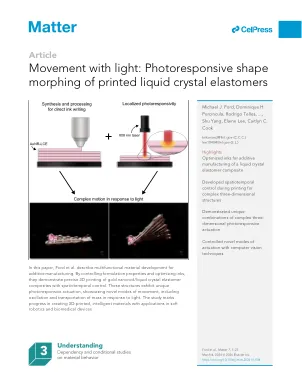
轻巧的运动:印刷液晶弹性体的光反应形状变形
摘要软计算机将需要柔软的材料,这些材料表现出丰富的功能多样性,包括形状变形和光反应。这些功能的组合可以在软计算机中有用的行为,可以通过合成表现出局部响应性的材料来进一步发展。可以通过为直接墨水写作(DIW)制定复合墨水来启用液晶弹性体(LCE)的局部响应(LCE),它们是表现出形状变形的软材料。金纳米棒(Aunrs)可以添加到LCES中,以通过局部表面等离子体共振吸收光后光热形状变化。我们比较了LCE公式,重点是DIW和Aunrs的光响应性打印。不同的三维体系结构的局部响应能力启用了可以振荡,爬网,滚动,运输质量并显示其他独特的致动和运动模式,以响应光线,从而使这些有希望的功能材料用于高级应用程序。

多功能磁性软复合材料:评论
抽象的磁反应性软材料是软复合材料,将磁性填充剂嵌入软聚合物矩阵中。这些活性材料由于能够在磁场的应用下通过远程和不受束缚的控制实现快速,可编程的形状变化,因此吸引了广泛的研究和工业兴趣。他们将在软机器人/设备,超材料和生物医学设备中具有许多高影响力的潜在应用。具有广泛的功能磁性填充剂,聚合物矩阵和先进的制造技术,可以对材料特性进行编程,以用于集成功能,包括可编程形状变形,基于动态形状变形的机能,对象操纵和组装,远程热量,远程热量产生以及可重新配置电子设备。在这篇评论中,提出了多功能磁性响应式软材料中最先进的发展和未来观点的概述。

挂一件T恤:迈向具有多模式触觉反馈
摘要 - 由于其在国内和工业领域中的广泛应用,因此在机器人技术中,孔洞操纵一直是一个长期存在的问题。由于感知和建模的进步,可变形的对象操纵吸引了越来越多的关注。本文重点介绍了这些问题的交集,其中必须将一个孔变形以允许钉入口。此任务的常见国内应用是将衣架穿过T恤的领口将其悬挂。我们证明,通过使用来自Gelsight传感器的多模式触觉反馈可以降低问题的复杂性。高分辨率接触检测有助于将掌握到T恤上合适的位置。使用触觉反馈跟踪力轨迹,我们的算法可以操纵大小和刚度的T恤,以使它们的领口封闭衣架。我们的实验结果表明与理论分析保持一致。我们预计我们提出的方法将更广泛地适用于需要同时估算和执行弹性对象的力轨迹的其他问题。
