XiaoMi-AI文件搜索系统
World File Search System可控性

结构脑网络可控性方法论考虑的实用指南
摘要 目的。预测大脑如何通过内部或外部控制进入特定状态需要从根本上理解神经连接与活动之间的关系。网络控制理论是物理和工程科学中一个强大的工具,可以提供有关这种关系的见解;它形式化了复杂系统的动态如何从其相互连接的单元的底层结构中产生的研究。方法。鉴于网络控制理论最近在神经科学中的应用,现在是时候为结构脑网络可控性的方法论考虑提供实用指南了。在这里,我们系统地概述了该框架,研究了建模选择对经常研究的控制指标的影响,并提出了可能有用的理论扩展。我们的讨论、数值演示和理论进展基于一个高分辨率扩散成像数据集,该数据集包含 730 个扩散方向,这些扩散方向是从十名健康年轻人身上扫描约 1 小时获得的。主要结果。在对该理论进行教学介绍之后,我们探讨了建模选择如何影响四个常见统计数据:平均可控性、模态可控性、最小控制能量和最佳控制能量。接下来,我们将通过两种方式扩展当前的最新技术:首先,开发一种替代的结构连接测量方法,以解释活动通过邻接组织的径向传播;其次,定义一个补充指标,量化系统能量景观的复杂性。最后,我们将提出具体的建模建议并讨论方法论上的限制。意义。我们希望这个通俗易懂的解释将激励神经成像界更充分地利用网络控制理论的潜力,解决认知、发育和临床神经科学中的紧迫问题。
超越偶极子近似的量子控制领域:可控性、奇异控制和资源
我们通过在哈密顿量中加入极化项来研究超出偶极近似的封闭 n 级量子系统的控制景观。后者在控制场中是二次的。对奇异控制进行了理论分析,奇异控制是产生景观陷阱的候选对象。将考虑奇异控制存在的结果与偶极近似(即没有极化)中的结果进行了比较。在加入极化项后,对控制景观中陷阱的存在进行了数值分析,以产生超出偶极近似的幺正变换。通过创建许多随机哈密顿量(在单个控制场中包含线性和二次项),对这些控制景观进行了广泛的探索。发现的奇异控制都不是局部最优的。这一结果扩展了最近关于进行偶极近似的量子系统典型景观的大量研究。我们进一步研究了极化率的大小与优化产生的控制通量之间的关系。结果还表明,在原本不可控的偶极耦合系统中加入极化率项可以通过恢复可控性从相应的控制景观中移除陷阱。我们用数字方式评估了极化率项对特定三级 3 系统已知示例的影响,该系统的控制景观中有一个二阶陷阱。结果发现,极化率的增加会从景观中移除陷阱。讨论了这些模拟的一般实际控制含义。

通过图积表征复合复杂网络的能量相关可控性
摘要——本文描述了复合复杂网络的能量相关可控性。我们考虑一类通过笛卡尔积由简单因子网络构建的复合网络。所考虑的因子网络是具有基于邻居的拉普拉斯动力学的领导者-追随者符号网络,采用正边和负边来捕捉网络单元之间的合作和竞争相互作用。与大多数现有的关注经典可控性的研究不同,本文从能量相关的角度研究了复合网络的可控性。具体而言,基于笛卡尔图积来表征可控性格拉姆度量,包括平均可控性和体积控制能量,这揭示了如何从局部因子系统的谱特性推断出复合网络的能量相关可控性。然后,这些结果扩展到分层控制网络,这是一种特殊但广泛使用的网络结构,在许多人造系统中使用。由于结构平衡是符号网络的关键拓扑性质,因此,提出了验证复合符号网络结构平衡的必要充分条件,适用于广义图积。

结构可控性预测功能模式和大脑刺激益处与工作记忆
大脑是一个固有的动态系统,许多工作都集中在通过局部扰动和全局网络集合功能变化来修饰神经活动的能力上。网络可控性是网络神经科学中的最新概念,该概念旨在预测单个皮质位点对全球网络状态和状态变化的影响,从而对局部对全球脑动力学的影响产生统一的说明。尽管该概念在工程科学中被接受,但在神经科学中的持续辩论中,将网络可控性与大脑活动和人类行为联系起来的经验证据仍然很少。在这里,我们提出了一组源自fMRI,扩散张量成像和在线重复的经颅磁刺激(RTMS)的多模式的大脑 - 行为关系 - 在由两个男女个人执行的单独校准的工作记忆任务中应用的。描述结构网络系统动力学的模式显示了与任务难度相关的大脑活动的直接关系,并且在硬任务条件下有助于功能性脑状态的难度到范围的模式。模态可控性(量化难以到达模式的贡献的措施)在受刺激的站点上预测了与任务难度增加和RTMS对任务绩效的益处相关的fMRI激活。此外,fMRI解释了模态可控性和与5 Hz在线RTMS相关的工作记忆益处之间64%的差异。因此,这些结果为网络控制理论的功能有效性提供了证明,并概述了整合结构网络拓扑和功能活动的清晰技术,以预测刺激对后续行为的影响。

结构可控性预测功能模式和大脑刺激益处与工作记忆
大脑是一个固有的动态系统,许多工作都集中在通过局部扰动和全局网络集合功能变化来修饰神经活动的能力上。网络可控性是网络神经科学中的最新概念,该概念旨在预测单个皮质位点对全球网络状态和状态变化的影响,从而对局部对全球脑动力学的影响产生统一的说明。尽管该概念在工程科学中被接受,但在神经科学中的持续辩论中,将网络可控性与大脑活动和人类行为联系起来的经验证据仍然很少。在这里,我们提出了一组源自fMRI,扩散张量成像和在线重复的经颅磁刺激(RTMS)的多模式的大脑 - 行为关系 - 在由两个男女个人执行的单独校准的工作记忆任务中应用的。描述结构网络系统动力学的模式显示了与任务难度相关的大脑活动的直接关系,并且在硬任务条件下有助于功能性脑状态的难度到范围的模式。模态可控性(量化难以到达模式的贡献的措施)在受刺激的站点上预测了与任务难度增加和RTMS对任务绩效的益处相关的fMRI激活。此外,fMRI解释了模态可控性和与5 Hz在线RTMS相关的工作记忆益处之间64%的差异。因此,这些结果为网络控制理论的功能有效性提供了证明,并概述了整合结构网络拓扑和功能活动的清晰技术,以预测刺激对后续行为的影响。

结构可控性可预测与工作记忆相关的功能模式和大脑刺激益处
这篇早期发布的文章已经过同行评审并被接受,但尚未经过撰写和编辑过程。最终版本在风格或格式上可能略有不同,并将包含指向任何扩展数据的链接。
人工智能对齐:全面性综述 - AI Alignment
Fig.1 RICE 原则定义了一个对齐系统应具备的四个关键特性,这四个特性并无特定顺序: (1) 鲁棒性 (Robustness) 指人工智能系统的稳定性需要在各种环境中得到保证; (2) 可解释性 (Interpretability) 指人工 智能系统的操作和决策过程应该清晰易懂; (3) 可控性 (Controllability) 指人工智能系统应该在人类的指导 和控制下运行; (4) 道德性 (Ethicality) 指出人工智能系统应该遵守社会规范和普适价值观。这四个原则指 导人工智能系统与人类意图和价值观的对齐。他们本身并不是最终目标,而是服务于对齐的中间目标。
![arXiv:1912.01270v3 [quant-ph] 2023 年 3 月 1 日](/simg/b\b8925800e98a19fb58f4c3c02d4e353d3a9dd58f.webp)
arXiv:1912.01270v3 [quant-ph] 2023 年 3 月 1 日
超不可控性是一种特殊的空间量子相关性,可以在存在有限共享随机性的转向场景中观察到。在这项工作中,我们在转向场景中定义了一个可通过实验测量的量来证明超不可控性。在这种场景的随机性认证背景下,我们证明了这种超不可控性的认证为真正的随机性生成量提供了界限。另一方面,超局部性是另一种空间量子相关性,可以在存在有限共享随机性的贝尔场景中观察到。我们确定了不等式来证明贝尔场景中的超局部性,可以采用这些不等式来实现 2 对 1 和 3 对 1 随机访问码。我们观察到,在存在有限共享随机性的情况下,这种超局部性的认证可作为随机访问码的资源。作为我们对超不可控性和超局域性认证的副产品,我们确定了具有量子性的可分离状态的新分类。
改良 Cooper Harper 量表 (MCH) - SKYbrary
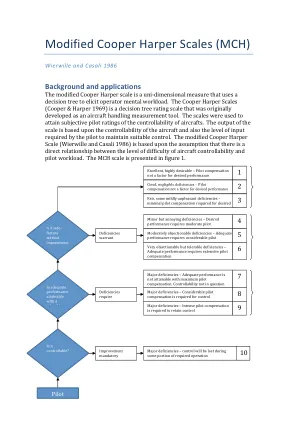
背景和应用 改进的 Cooper Harper 量表是一种使用决策树来引出操作员心理工作负荷的单维测量方法。Cooper Harper 量表(Cooper & Harper 1969)是一种决策树评定量表,最初是作为飞机操纵测量工具开发的。该量表用于获得飞行员对飞机可控性的主观评级。量表的输出基于飞机的可控性以及飞行员保持适当控制所需的输入水平。改进的 Cooper Harper 量表(Wierwille 和 Casali 1986)基于以下假设:飞机可控性的难度水平与飞行员工作负荷之间存在直接关系。MCH 量表如图 1 所示。
改良 Cooper Harper 量表 (MCH) - SKYbrary
背景和应用 改进的 Cooper Harper 量表是一种使用决策树来引出操作员心理工作量的单维测量方法。Cooper Harper 量表(Cooper & Harper 1969)是一种决策树评级量表,最初是作为飞机操纵测量工具开发的。该量表用于获得飞行员对飞机可控性的主观评级。量表的输出基于飞机的可控性以及飞行员保持适当控制所需的输入水平。改进的 Cooper Harper 量表(Wierwille and Casali 1986)基于以下假设:飞机可控性的难度与飞行员工作量之间存在直接关系。MCH 量表如图 1 所示。