XiaoMi-AI文件搜索系统
World File Search System可用功率

Arduino Mega 2560的可用功率,无需求助于Extern Supply
1简介人类机器人是一个基于人体的机器人,其整体外观。感知,处理和行动以众所周知的拟人形式体现,以模仿人体和经验的物理,认知和社会层面的某些子集。在一般的类人动物机器人中,有一个躯干,有一个头部,两个手臂和两条腿,尽管某些形式的人形机器人可能仅对腰部的一部分建模。一些类人形机器人也可能有“脸”,带有“眼睛”和“嘴”。类人生物的定义与“具有人类特征”一样简单。有许多公司出于教育或娱乐目的生产类人动物机器人。Robotis是其中之一。在本文期间,我们主要使用它们的bioloid综合机器人。每个类型机器人都有其微控制器单元,能够操纵伺服器并管理其他员工。主要目标是用一个通用的开源微控制器来控制机器人,该机器人可以以合理的价格获得。该决定是Arduino Mega 2560。

超级强大 - IIS Windows 服务器
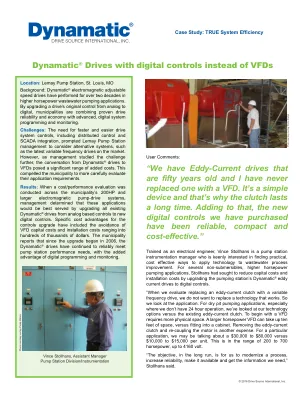
Lab.gruppen 的 D 系列为顾问和集成商提供了前所未有的灵活性,可以指定放大器输出通道以满足单个复杂项目中不同的负载条件。Rational Power Management (RPM) 首次在四个输出通道之间分配可用功率方面提供了真正的灵活性。每个通道都可以根据所连接负载的要求进行定制,并且任何未用于该通道的功率都可以分配给其他通道使用。



下一代太空基系统的热创新...
太空为微电子设备带来了独特的热环境挑战,太空平台的尺寸和冷却能力的可用功率都受到限制。在本次研讨会上,我们将在通信和传感应用对太空电子设备更高性能和功能性日益增长的需求背景下确定这些挑战。特别是,我们将探索用于管理高密度电子设备不断增加的热负荷的热管理解决方案,特别关注新型冷却技术和材料。研讨会将概述 DARPA 计划(例如 Minitherms 3D、ELGAR、幼苗和未来计划)、其他政府机构(如 USSF 和 AFRL)对现有挑战和技术差距的看法,以及学术界和行业顶尖专家的见解。

Fullriver HC系列电池
现在,您确实可以拥有两全其美的最好的 - 溢出的AGM电池,它比传统的启动电池(最多2250曲柄放大器 @ 25 deg.c)提供了更多的曲柄功率,并结合了真正的深度循环功能。高纯度铅AGM Construction接受快速重新充电,比传统的深循环电池提供更多的可用功率。也可以通过其明亮的黄色套管,Fullriver HC系列(高曲柄 /高循环)来识别,也可以使用粉末涂层的黑色金属夹克订购,以进一步提高越野应用中的耐影性和耐用性,包括四轮驾驶和赛车运动。

比较限电环境下的控制策略
工厂控制逻辑会对能量收集产生重大影响。在公用事业公司实施限电和/或限电率的市场,以及天气多变和云层覆盖导致逆变器之间可用功率差异很大的日子里,情况尤其如此。AlsoEnergy 使用实验室模拟来比较一座建于 26.6MWac 容量的工厂的每日产量。我们比较了 3 种控制技术:基于逆变器的控制、POI 处的逆变器组控制,以及 AlsoEnergy 的动态能量收集优化,后者可在 POI 处实现独立的逆变器控制。测试环境模拟了夏威夷一个典型的、大部分晴朗的日子,随着云层飘过,部分区域被遮蔽。根据互连协议的条款,工厂的实际功率限电率限制设定为每分钟 2 MW,最高限电为 20 MWac。
光伏直流微电网优化潮流控制系统
摘要。功率流控制系统在具有光伏输入的直流微电网中发挥着重要作用,可为负载提供连续电力。由于太阳辐射和温度的波动,光伏模块的输出功率可能会下降,因此必须使用电池和公用电网来减少不良变化的负面影响。然而,需要一种有效的控制策略来确保不间断地向负载单元供电。本文提出了一种基于库仑计数法的充电状态电池功率估计技术的改进能量流控制。通过使用充电状态技术准确估计电池的可用功率,微电网能够确定是否需要在光伏模块的功率输出不足以满足负载需求时切换到电网。所提出的方法还消除了基于直流总线电压水平的方法来对电池进行充电或放电的需要,具有显著减少直流总线电压变化的优点。该方法的仿真结果表明,该方法提供了令人满意的控制性能,满足了负载需求。