机构名称:
¥ 1.0
1简介人类机器人是一个基于人体的机器人,其整体外观。感知,处理和行动以众所周知的拟人形式体现,以模仿人体和经验的物理,认知和社会层面的某些子集。在一般的类人动物机器人中,有一个躯干,有一个头部,两个手臂和两条腿,尽管某些形式的人形机器人可能仅对腰部的一部分建模。一些类人形机器人也可能有“脸”,带有“眼睛”和“嘴”。类人生物的定义与“具有人类特征”一样简单。有许多公司出于教育或娱乐目的生产类人动物机器人。Robotis是其中之一。在本文期间,我们主要使用它们的bioloid综合机器人。每个类型机器人都有其微控制器单元,能够操纵伺服器并管理其他员工。主要目标是用一个通用的开源微控制器来控制机器人,该机器人可以以合理的价格获得。该决定是Arduino Mega 2560。
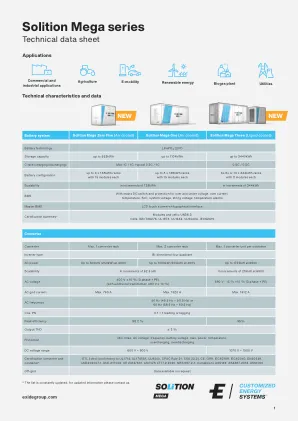
Arduino Mega 2560的可用功率,无需求助于Extern Supply
主要关键词





相关文件推荐