机构名称:
¥ 1.0
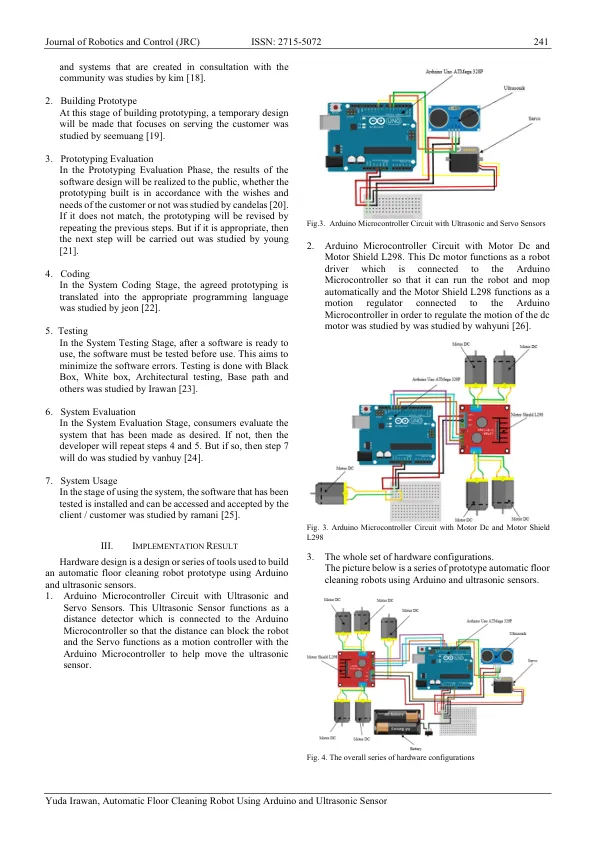
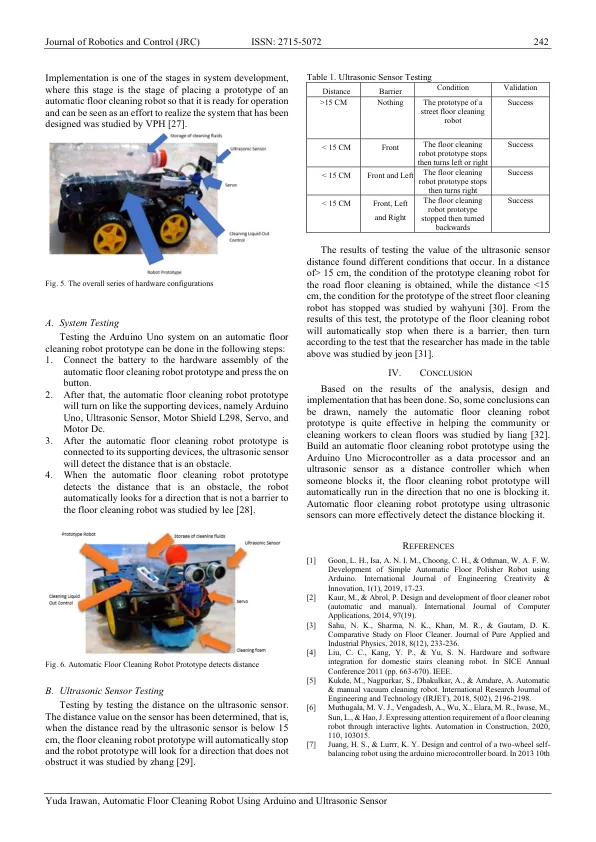
摘要 - 整个地板清洁机器人分为几个部分,即由超声传感器,电动机屏蔽L298,Arduino Uno Microcontroller,Servo和DC电机组成。当Arduino Uno微控制器作为距离检测器和DC电动机作为机器人驱动器处理超声波电机时,此工具可以工作,然后DC电机由电动机屏蔽L298驱动。当超声波传感器检测到其前面的障碍物时,机器人将自动寻找不是地板清洁机器人障碍的方向。已经确定了传感器上的距离值,即,当超声传感器读取的距离低于15 cm时。测试超声传感器距离值的结果发现了发生的不同条件。在> 15厘米的距离内,获得了用于道路地板清洁的原型清洁机器人的状况,而距离<15 cm的距离,街道地板清洁机器人原型的状态已停止。
使用Arduino和...
主要关键词

相关文件推荐