XiaoMi-AI文件搜索系统
World File Search System后退

SELRES / VTU 水手不符合退休资格且未处于值班状态 NRC 职责:
与 CNRFC N1 核实以确认是否符合《9/11 后退伍军人权利法案》的资格 N1C2 家属需要联系 VA 以利用《9/11 后》福利(如果符合资格)。身份证更新需要为符合资格的幸存家属签发更新的身份证。“符合资格的幸存家属需要该成员在 60 岁时的退休金资格通知的副本。预备役成员的符合资格的幸存家属,已获得 20 年的退休资格年限,并在 60 岁时收到退休金资格通知,但未满 60 岁,未转入退休预备役,并且在达到 60 岁之前死亡。注意:DD 表格 1173-1 一直签发到该成员如果还活着的话应该年满 60 岁为止。 DD 表格 1173 仅在会员生存时年满 60 岁或之后签发。”

粗糙表面上的接触角滞后
以动量守恒为起点,推导出一个多相机械能量平衡方程,该方程考虑了移动控制体积内存在的多个材料相和界面。该平衡应用于固定在三相接触线上的控制体积,该接触线在粗糙且化学均匀且惰性的固体表面上连续前进。使用控制体积内材料行为的半定量模型,进行数量级分析以忽略不重要的项,根据三相接触线周围发生的界面动力学知识,生成一个预测接触角滞后的方程。结果表明,三相接触线“粘滑”运动期间发生的粘性能量耗散是粗糙表面接触角滞后的原因,可以通过中间平衡界面状态的变化来计算。该平衡适用于 Wenzel、Cassie–Baxter 和 Fakir(超疏水)润湿状态,表明对于 Fakir 情况,在界面前进和后退过程中都会发生显著的耗散,并将这些耗散与“粘滑”事件周围发生的界面面积变化联系起来。
执行摘要报告
对于初始服务,目标没有太阳同步轨道,其平均地方时漂移约为 20 度/年。目标升交点地方时将在 2024 年 11 月约为 13h45,这限制了可能的插入轨道。分离和发射后退轨后,对平台进行标准调试,并增加捕获机制和会合传感器的功能测试。服务器通过节点进动和倾角校正匹配目标轨道平面,执行轨道提升和相位调整,将自身置于预期目标位置后方 30 公里处并探测目标。服务器使用仅角度导航逐渐安全地缩短距离。服务器收集并下行目标和会合传感器上的数据,并调试相对 GNC 执行近距离轨迹,逐渐靠近目标并最终捕获目标。目标和服务器的组合堆栈退轨。捕获数据已传输,堆栈的质心与推力轴对齐。堆栈已准备好重返大气层并脱离轨道。
FY23 ARNG 教育福利手册
退伍军人权利法案计划是法定权利,由各军种和退伍军人事务部 (DVA) 管理。士兵可在任何一项 DVA 教育援助计划中获得最多 36 个月的福利,如果符合两个或多个 DVA 教育援助计划的资格,则最多可获得 48 个月的综合福利。如需了解最新的退伍军人权利法案信息,请访问 DVA 网站:https://benefits.va.gov/gibill/。以下是 ARNG 士兵可获得的最常见的退伍军人权利法案教育援助计划: 蒙哥马利退伍军人权利法案 - 选定预备役(第 1606 章) 蒙哥马利退伍军人权利法案 - 选定预备役奖励(Kicker) 蒙哥马利退伍军人权利法案 - 现役(第 30 章) 9/11 后退伍军人权利法案(第 33 章) 黄丝带计划 教育福利转移 (TEB) 计划
FY23 ARNG 教育福利手册
退伍军人权利法案计划是法定权利,由各军种和退伍军人事务部 (DVA) 管理。士兵可在任何一项 DVA 教育援助计划中获得最多 36 个月的福利,如果符合两个或多个 DVA 教育援助计划的资格,则最多可获得 48 个月的综合福利。如需了解最新的退伍军人权利法案信息,请访问 DVA 网站:https://benefits.va.gov/gibill/。以下是 ARNG 士兵可获得的最常见的退伍军人权利法案教育援助计划: 蒙哥马利退伍军人权利法案 - 选定预备役(第 1606 章) 蒙哥马利退伍军人权利法案 - 选定预备役奖励(Kicker) 蒙哥马利退伍军人权利法案 - 现役(第 30 章) 9/11 后退伍军人权利法案(第 33 章) 黄丝带计划 教育福利转移 (TEB) 计划
对调整文本到图像扩散模型的深度奖励监督
摘要。使用给定的重新函数优化文本对图像扩散模型是一个重要但毫无争议的研究领域。在这项研究中,我们提出了深度奖励调整(DRTUNE),该算法直接监督文本到图像扩散模型的最终输出图像,并通过迭代采样过程向输入噪声进行后退。我们发现,采样过程中的较早步骤对于低水平的奖励至关重要,并且可以通过停止denoing net-work-work-work-work输入的梯度来有效地实现深层监督。Drtune在各种奖励模型上进行了广泛的评估。它始终优于其他算法,尤其是对于所有浅层监督方法失败的低级控制信号。此外,我们通过DRTUNE微调稳定扩散XL 1.0(SDXL 1.0)模型,以优化人类偏好得分v2.1,从而导致有利的扩散XL 1.0(FDXL 1.0)模型。FDXL 1.0显着提高了图像质量,并且与Midjourney v5.2相比,质量可比。5

文章利用优化方法改进东京国际机场地面运行
摘要:由于航空运输需求的快速增长,机场地面出现拥堵和延误。本研究的目的是确定优化和观察到的运营之间的差异,以改善东京国际机场的机场地面运营,方法是使用混合整数线性规划来最小化基于实时航班信息的总地面移动距离和时间。考虑使用后退式视界方案来适应动态环境。与观测数据相比,该模型获得的结果使滑行距离减少了 18.54%,滑行时间减少了 29.77%。优化结果与观测数据之间的滑行道使用模式的比较可以深入了解优化过程,例如跑道交叉策略和滑行道方向规则的变化。发现目标函数权重和航空公司与航站楼关系等因素对优化结果有显著影响。本研究提出了可以在机场进行的改进,以实现更高效的地面运营。
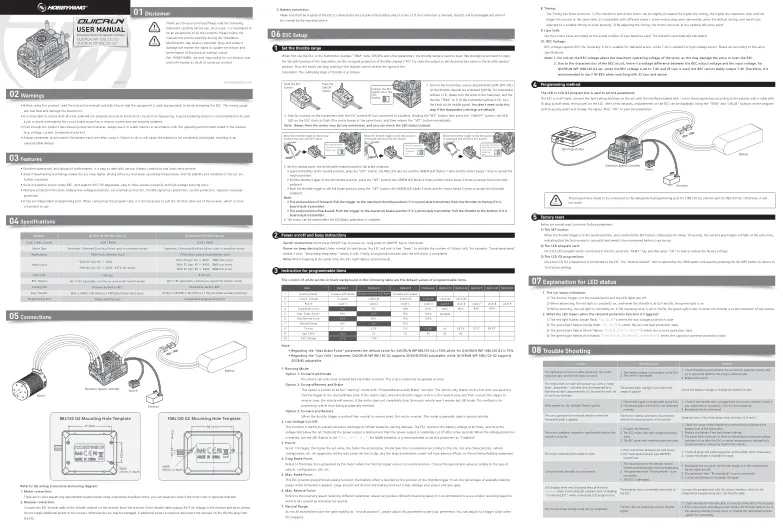
HW-SMA326DUL00_QUICRUN WP 8BL150&10BL120 G2 ...
3. 设置中立点、全油门终点和全刹车终点。 • 遥控器在中立位,按“SET”键,红灯灭,绿灯闪1下,电机蜂鸣1声,接受中立位。 • 将油门扳机拉到全油门位置,按“SET”键,绿灯闪2次,电机蜂鸣2声,接受全油门终点。 • 将油门扳机推到全刹车位置,按“SET”键,绿灯闪3次,电机蜂鸣3声,接受全刹车终点。 注意: • 前进终点:手枪式遥控器,将扳机拉到最大油门位置,板式遥控器,将油门推到最上面。 • 后退终点:手枪式遥控器,将扳机推到最大刹车位置。如果是板式遥控器,请将油门拉到最低点。4. ESC/Radio 校准完成后,即可启动电机。

DIF
我们提出了直接的奖励微调(草稿),这是一种简单有效的方法,用于调整扩散模型,以最大程度地提高可区分的奖励功能,例如人类偏好模型的分数。我们首先表明,可以通过完整的抽样程序将奖励函数梯度进行后退,并且这样做可以在各种奖励上实现强劲的绩效,超过了基于强化学习的方法。然后,我们提出了草稿:草稿K的更多有效变体,该变体仅将反向传播截断为采样的最后K步骤,而Draft-LV则获得了k = 1时的较低差异梯度估计。我们表明,我们的方法在各种奖励功能上都很好地工作,可以用来实质上提高稳定扩散1.4产生的图像的美学质量。最后,我们在方法和先前的工作之间建立了联系,从而提供了基于基于梯度的细胞调整算法的设计空间的统一观点。

分析人工神经>锂离子电池的电荷状态
电荷状态(SOC)是电池剩余容量至关重要的评估指标。需要进行精确的社会估计对于确保锂离子电池的安全功能并防止过载和过度耗尽非常重要。但是,可再生能源的独立应用已成为确定锂离子电池SOC确切能力的关键问题。为了估算随着时间的推移能力,电池管理系统计算了锂离子电池的SOC。这允许实施智能控制系统。本文在估计电池SOC中的后退传播(BP)神经网络(BP)神经网络(NN)的限制和弱点之后,介绍了SOC电池估算的增强径向基础功能(RBF),例如趋势速度缓慢,概括较差,并且可以提高网络的准确性,但需要时间才能进行时间。实时使用实验数据训练增强的RBF。将经过训练的SOC的NN与实际值进行了比较,MATLAB用于模拟评估其准确性的方法。