XiaoMi-AI文件搜索系统
World File Search System器人



EZPro100 HID 烧写器使用说明
8.1 MC51F8114 烧录说明 ...................................................................................................... 18 8.2 MC32F7341 、 MC32F7342 烧录说明 ............................................................................... 19 8.3 MC32F7343 烧录说明 ...................................................................................................... 21 8.4 MC30F6910 烧录说明 ...................................................................................................... 22 8.5 MC32F7062 烧录说明 ...................................................................................................... 23 九、烧录软件 CRC 校验值说明 .................................................................................................... 24 十、错误信息对照表 ..................................................................................................................... 25 十一、更新记录: ......................................................................................................................... 29

中文- 如何使用MDB-RS232® 测试纸币找零器
( 读取回来的数值标识哪种类型的纸币是在接收币后进入找零器 ) 这样我们知道哪种纸币在找零器中,能用于后续的找零 3703 回复 : 00 04 04 ( 这意味着类型 2 纸币是预设置进入找零器 : 00000000 00000100) 回复 : 00 01 01 ( 这意味着类型 0 纸币是预设置进入找零器 : 00000000 00000001) 如果回复的是其它数值,可以对应转换为 2 进制数值,对应货币通道去理解 3.使能找零器


EZCast 4K无线同屏器快速入门指南
感谢您使 ⽤ EZCast 产品。 EZCsat 4K 是一款通过插入电视机 HDMI 接 ⼜ 来实现串流的多媒体无线同屏器。 EZCast4K ⽀ 持 802.11n 和 802.11ac ( 2.4G/5G )双频宽带,为多种无线连 接协议包括 Miracast, DLNA 和 Airplay 提供稳定的连接。 EZCast 4K 同时提供梦幻式的 ⾃ 动播放功能,不需要 ⼿ 机的 参与就能 ⾃ 动播放您喜爱的节 ⽬ 。 EZCast 4K 同屏器支 援 4K 视频解码为您提供卓越的观看体验 。 EZCast 4K ⽀ 持固件在线升级,以满 ⾜ 各种 ⼿ 机系统更新后的设备兼容 性需求。 EZCast 4K 与 EZCast app 2.0 和 EZCast Channel app 合作, ⽀ 持各种操作系统如 iOS, 安卓, Mac ,微软 Windows 和 Chrome 。 EZCast2.0 应 ⽤ 程序提供多种很酷的功能,如 EZChannel, ⾳ 乐,视频,相机和浏览器等。现在请下载 EZCast2.0 应 ⽤ 程序体验所有的功能。请阅读快速入门指南 设置您的 EZCast 产品。 Happy Casting!

空调设备功能恢复工程
对于将来的行政程序,您将需要提交和接收以下文件:此外,自2021年度起,若有希望实施建设工程的人士提出请求,部分行政手续将可通过电子邮件办理。若有此意愿,请在提交补助金申请前告知国家政府或国家政府委托的人员。对于通过电子邮件办理的行政手续,在填写完各种文件上的必要信息后,需要自行将其转换为PDF格式,然后通过电子邮件发送。因此,需要有可以将文件转换为PDF的设备(例如扫描仪)。

空调设备功能恢复工程
(1)登记事项证明书或者住所证明书 (2)驾驶执照等的复印件(属于第4项的情况除外) (3)证明建设申请人是社会保护法第6条第1项规定的保护对象或者促进留在中国等的日本人顺利回国及支援留在中国等的日本人及其特定配偶永久回国自立的法律第14条规定的抚养给付对象(以下称为“保护对象等”)的文件(仅当建设申请人是保护对象等时才附加)

人工智能医疗设备的现状和未来
任何仪器、设备、器具、软件、材料或其他物品,无论是单独使用还是组合使用,连同任何附件,包括制造商旨在专门用于诊断和/或治疗目的的软件,以及其正确应用所必需的软件,制造商旨在用于人类的以下目的: — 疾病的诊断、预防、监测、治疗或缓解, — 伤害或残疾的诊断、监测、治疗、缓解或补偿, — 解剖或生理过程的研究、更换或修改, — 受孕的控制,并且其在人体内或人体上的主要预期作用不是通过药理学、免疫学或代谢手段实现,但可以通过此类手段辅助其发挥作用
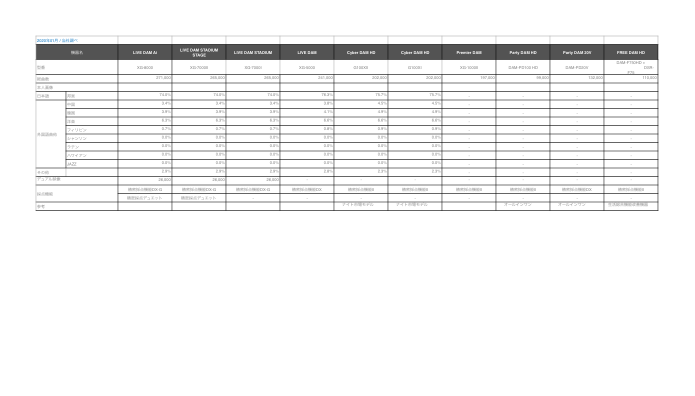
2020 年 1 月 / 根据我们的研究,设备名称为 LIVE DAM Ai...
舞台现场 DAM 体育场现场 DAM Cyber DAM HD Cyber DAM HD 首映 DAM 派对 DAM HD 派对 DAM 20V 免费 DAM HD