XiaoMi-AI文件搜索系统
World File Search System四轴

使用现代工具对无人机进行触觉建模和仿真
2.1 研究动机 ................................................................................................................................................ 11 2.2 最新技术 ................................................................................................................................................ 12 2.3 本研究贡献 ................................................................................................................................................ 13 2.3.1 使用现代工具对四轴飞行器进行动态建模 ............................................................................................. 13 2.3.2 四轴飞行器的系统控制 ............................................................................................................................. 14 2.3.3 触觉系统控制 ................................................................................................................................ 14 2.4 直升机 VS 其他飞行原理 ............................................................................................................................. 14 2.4.1 短距 VTOL 配置比较 ............................................................................................................................. 15 2.4.2 未来无人机的 VTOL 配置 ............................................................................................................. 16 2.4.2.1 同轴配置 ................................................................................................................................ 16 2.4.2.2 四轴飞行器配置........................................................................................................... 17 2.5 什么是触觉技术? ...................................................................................................................................... 17 2.5.1 触觉系统控制的相关研究 ........................................................................................................ 18 2.5.2 触觉控制器 ................................................................................................................................ 19 2.5.3 触觉控制器的应用 ...................................................................................................................... 20 2.6 结论 ...................................................................................................................................................... 22
使用现代工具对无人机进行触觉建模和仿真
2.1 研究动机 ................................................................................................................................................ 11 2.2 最新技术 ................................................................................................................................................ 12 2.3 本研究贡献 ................................................................................................................................................ 13 2.3.1 使用现代工具对四轴飞行器进行动态建模 ............................................................................................. 13 2.3.2 四轴飞行器的系统控制 ............................................................................................................................. 14 2.3.3 触觉系统控制 ................................................................................................................................ 14 2.4 直升机 VS 其他飞行原理 ............................................................................................................................. 14 2.4.1 短距 VTOL 配置比较 ............................................................................................................................. 15 2.4.2 未来无人机的 VTOL 配置 ............................................................................................................. 16 2.4.2.1 同轴配置 ................................................................................................................................ 16 2.4.2.2 四轴飞行器配置........................................................................................................... 17 2.5 什么是触觉技术? ...................................................................................................................................... 17 2.5.1 触觉系统控制的相关研究 ........................................................................................................ 18 2.5.2 触觉控制器 ................................................................................................................................ 19 2.5.3 触觉控制器的应用 ...................................................................................................................... 20 2.6 结论 ...................................................................................................................................................... 22
使用现代工具对无人机进行触觉建模和仿真
2.1 研究动机 ................................................................................................................................................ 11 2.2 最新技术 ................................................................................................................................................ 12 2.3 本研究贡献 ................................................................................................................................................ 13 2.3.1 使用现代工具对四轴飞行器进行动态建模 ............................................................................................. 13 2.3.2 四轴飞行器的系统控制 ............................................................................................................................. 14 2.3.3 触觉系统控制 ................................................................................................................................ 14 2.4 直升机 VS 其他飞行原理 ............................................................................................................................. 14 2.4.1 短距 VTOL 配置比较 ............................................................................................................................. 15 2.4.2 未来无人机的 VTOL 配置 ............................................................................................................. 16 2.4.2.1 同轴配置 ................................................................................................................................ 16 2.4.2.2 四轴飞行器配置........................................................................................................... 17 2.5 什么是触觉技术? ...................................................................................................................................... 17 2.5.1 触觉系统控制的相关研究 ........................................................................................................ 18 2.5.2 触觉控制器 ................................................................................................................................ 19 2.5.3 触觉控制器的应用 ...................................................................................................................... 20 2.6 结论 ...................................................................................................................................................... 22
四图表 - 海军蓝 STP
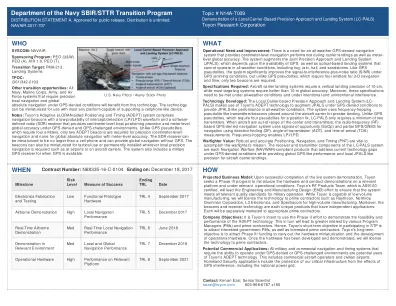
注释:Toyon 的自适应 eLORAN 辅助定位和授时 (ADEPT) 系统包括具有低截获/检测概率 (LPI/LPD) 波形的导航信标和软件定义无线电 (SDR) 接收器,该接收器可在 GPS 拒绝和 GPS 挑战环境下提供厘米级本地定位精度和米级全球精度。与需要四个发射器的 GPS 伪卫星不同,精确(厘米级)导航只需要两个 ADEPT 信标,而米级精度的全球绝对导航则不需要。SDR 接收器可以缩小到不超过手机大小,并且可以在没有 GPS 的情况下提供全球导航。信标还可以缩小以用于战术用途或永久安装在需要本地精确导航的任何地方,例如机场或航空母舰上。该系统还包括一个军用 GPS 接收器,用于 GPS 可用时。

DNA四链体
摘要 Sen 和 Gilbert [Nature, (1988) 334, 364- 366] 证实,来自人类免疫球蛋白开关区的富含鸟嘌呤的单链 DNA 能够自我结合形成稳定的四链平行 DNA 结构。拓扑异构酶 11 不会切割单链 DNA 分子。令人惊讶的是,当该 DNA 序列退火为四链结构时,该酶确实会切割相同的 DNA 序列。观察到的两个切割位点与该 DNA 分子与互补分子配对以形成正常 B-DNA 双链时发现的位点相同。这些切割被证实是蛋白质连接的,并且可以通过添加盐来逆转,这表明拓扑异构酶 11 的反应机制正常。此外,由互补寡核苷酸与四链结构结合而形成的八链 DNA 分子也被拓扑异构酶 11 切割,尽管该分子对限制性内切酶消化具有抗性。这些结果表明,单链 DNA 可能具有引导拓扑异构酶 11 到达结合位点的序列信息,但该位点必须以正确的方式进行碱基配对才能做到这一点。四链 DNA 分子能够作为酶的底物这一事实进一步表明,这些 DNA 结构可能存在于细胞中。
两居室 三居室 四居室 ...
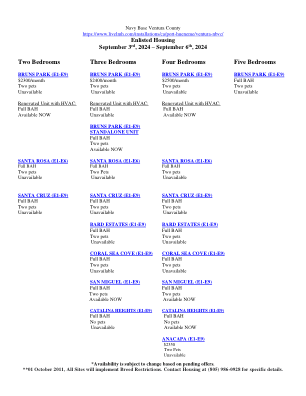
入伍住房 2024 年 9 月 3 日 – 2024 年 9 月 6 日 两间卧室 三间卧室 四间卧室 五间卧室 BRUNS PARK(E1-E9) BRUNS PARK(E1-E9) BRUNS PARK(E1-E9) BRUNS PARK(E1-E9) 2300 美元/月 2400 美元/月 2500 美元/月 全额 BAH 两只宠物 两只宠物 两只宠物 两只宠物 不可用 不可用 不可用 不可用 带 HVAC 的翻新单元: 带 HVAC 的翻新单元: 带 HVAC 的翻新单元: 全额 BAH 全额 BAH 全额 BAH 现已可用 不可用 现已可用 BRUNS PARK(E1-E9) 独立单元 全额 BAH 两只宠物 现已可用 SANTA ROSA(E1-E6) SANTA ROSA(E1-E6) SANTA ROSA(E1-E6) 全额 BAH全额 BAH 全额 BAH 两只宠物 两只宠物 两只宠物 不可用 不可用 不可用 圣克鲁斯 (E1-E9) 圣克鲁斯 (E1-E9) 圣克鲁斯 (E1-E9) 全额 BAH 全额 BAH 两只宠物 两只宠物 两只宠物 不可用 不可用 不可用

使用四唑测试1
摘要:“ Faveira”(Dimorphandra Gardneriana Tul。)是一种具有巨大商业价值的药用植物,这主要是由于其在全球范围内生产鲁丁的能力。此外,它是提取其他次级代谢产物的原材料来源。这项研究旨在标准化四唑测试的方法,并评估其在估计Faveira不同父植物的种子生存能力方面的适用性。使用四唑(2、3、5-三苯基四唑烷氯化物)确定种子的活力和活力,以四个浓度(0.025、0.050、0.075和0.075和0.1%和0.1%)和四个沉浸周期:30、60、60、90、90和120分钟,与virodition的模式相提并论。发芽和幼苗出现测试。最合适的D. gardneriana种子的制剂在25°C下进行78小时,然后在胚胎相对的区域切割。四唑测试有效地评估了D. gardneriana种子的生存能力和活力,其理想的种子颜色是在40°C下使用0.075%四唑溶液获得120分钟的理想种子颜色。在20个父植物中,父母植物2、3、6、8、9、12和13中的种子最有活力。
使用现代工具对无人机进行触觉建模和仿真
2.1 研究动机 ................................................................................................................................................ 11 2.2 最新技术 ................................................................................................................................................ 12 2.3 本研究贡献 ................................................................................................................................................ 13 2.3.1 使用现代工具对四轴飞行器进行动态建模 ............................................................................................. 13 2.3.2 四轴飞行器的系统控制 ............................................................................................................................. 14 2.3.3 触觉系统控制 ................................................................................................................................ 14 2.4 直升机 VS 其他飞行原理 ............................................................................................................................. 14 2.4.1 短距 VTOL 配置比较 ............................................................................................................................. 15 2.4.2 未来无人机的 VTOL 配置 ............................................................................................................. 16 2.4.2.1 同轴配置 ................................................................................................................................ 16 2.4.2.2 四轴飞行器配置........................................................................................................... 17 2.5 什么是触觉技术? ...................................................................................................................................... 17 2.5.1 触觉系统控制的相关研究 ........................................................................................................ 18 2.5.2 触觉控制器 ................................................................................................................................ 19 2.5.3 触觉控制器的应用 ...................................................................................................................... 20 2.6 结论 ...................................................................................................................................................... 22

超级扭曲算法 Djihad Matouk - ijicic
摘要。目前,无人机型四轴飞行器的跟踪控制是研究人员的热点。为了解决这个控制问题,根据期望的目标选择合适的控制器是一个基本问题。尽管存在有害的抖动现象,滑模控制 (SMC) 仍表现出可接受的性能。本文通过二阶滑模控制 (2-SMC) 实现四轴飞行器的轨迹跟踪控制。它是保留传统 SMC 优势同时避免不良抖动效应的替代解决方案之一。具体而言,采用超扭转算法,该算法是对 2-SMC 的改进,无需任何滑动变量导数。为了确保稳定性并增强四轴飞行器的跟踪轨迹,设计了一种基于超扭转算法的全局块控制。所提出的技术具有很高的稳定性,因为它允许为每个位置和姿态状态推导适当的控制律。仿真结果证明了该方法在稳定性和跟踪控制方面的有效性。与经典SMC和2型模糊逻辑控制器进行了比较研究,以阐明所提出的2-SMC的有效性。关键词:四轴飞行器无人机,全轨迹跟踪,非线性控制,二阶滑模控制,超扭转算法