机构名称:
¥ 1.0
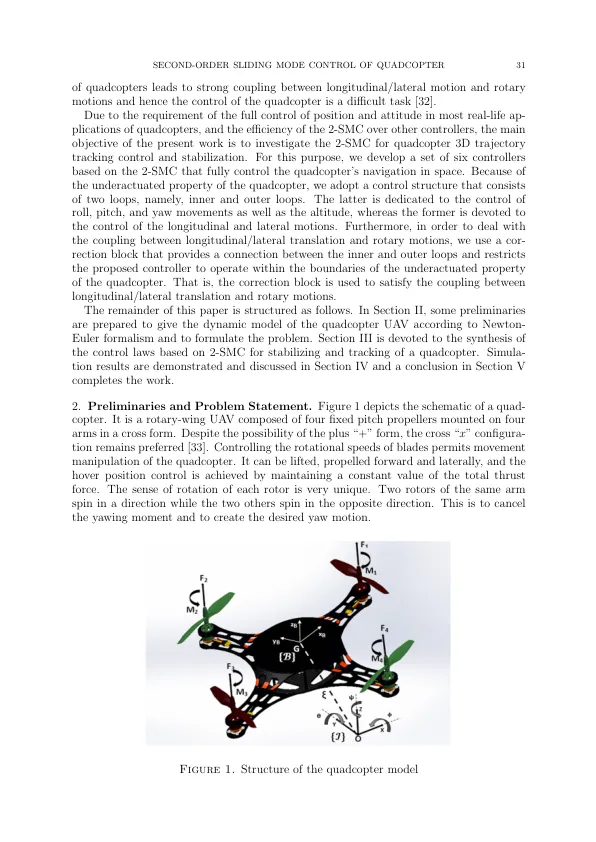
摘要。目前,无人机型四轴飞行器的跟踪控制是研究人员的热点。为了解决这个控制问题,根据期望的目标选择合适的控制器是一个基本问题。尽管存在有害的抖动现象,滑模控制 (SMC) 仍表现出可接受的性能。本文通过二阶滑模控制 (2-SMC) 实现四轴飞行器的轨迹跟踪控制。它是保留传统 SMC 优势同时避免不良抖动效应的替代解决方案之一。具体而言,采用超扭转算法,该算法是对 2-SMC 的改进,无需任何滑动变量导数。为了确保稳定性并增强四轴飞行器的跟踪轨迹,设计了一种基于超扭转算法的全局块控制。所提出的技术具有很高的稳定性,因为它允许为每个位置和姿态状态推导适当的控制律。仿真结果证明了该方法在稳定性和跟踪控制方面的有效性。与经典SMC和2型模糊逻辑控制器进行了比较研究,以阐明所提出的2-SMC的有效性。关键词:四轴飞行器无人机,全轨迹跟踪,非线性控制,二阶滑模控制,超扭转算法
超级扭曲算法 Djihad Matouk - ijicic
主要关键词



相关文件推荐