XiaoMi-AI文件搜索系统
World File Search System回声测深

海洋平台浅水回声测深仪的设计与开发
摘要 — 水下回声测深仪是水面和水下舰艇声纳套件不可或缺的一部分。这些系统通过提供船体龙骨和海底之间的实时距离来确保舰队的安全作业。本文我们报告了一种用于舰队舰艇的具有出色声学参数的浅水回声测深仪的设计和开发。原型回声测深仪的峰值发射电压响应 (TVR) 为 170 dB,接收电压灵敏度 (RVS) 为 –187 dBV/µPa,电阻抗为 193 Ω。此外,这种声学换能器的设计具有通过控制传感器几何形状来调整工作频率的灵活性。这种灵活性确保了对工作频率的控制和根据要求进行定制。关键词:浅水回声测深仪、PZT、单波束、声学匹配层、水文

第 3 章 深度测定
深度测定 1.简介 深度测定是水文测量员的一项基本任务,需要对介质、水下声学、可用于深度测量的大量设备、用于姿态和升沉测量的互补传感器以及适当的程序有具体的了解,以实现并满足国际推荐的精度和覆盖标准,如 IHO 出版物 S-44 第 5 版所述。铅垂线和测深杆是最早用于直接测量水深的方法。它们的简单操作原理确保了它们在许多世纪中持续使用。源自军用声纳的单波束回声测深仪是一项重大发展,自 20 世纪中期以来一直用于水文测量。在过去十年中,水文测量在深度测量技术和方法方面经历了概念上的转变。多波束回声测深仪 (MBES) 和机载激光测深系统 (ALS) 现在几乎可以覆盖整个海底并进行深度测量。高数据密度和高采集率产生了巨大的测深数据集和大量辅助数据。1998 年,编写第 4 版的 S-44 工作组对深度测量设备的最新技术进行了评估,结果如下:“单波束回声测深仪在浅水中的精度已达到亚分米级。市场上有各种不同频率、脉冲率等的设备。可以满足大多数用户,尤其是水文学家的需求。(…) 多波束回声测深仪技术正在迅速发展,如果使用适当的程序,并且系统的分辨率足以正确检测航行危险,则多波束回声测深仪技术具有进行准确和全面海底搜索的巨大潜力。机载激光测深是一项新技术,可以为浅水清澈水域的调查提供显着的生产力提升。机载激光系统能够测量 50 米或更深的深度。”尽管有这些新技术,但单波束回声测深仪 (SBES) 目前仍然是全球水文调查中使用的传统设备。这些回声测深仪也从模拟记录发展到数字记录,具有更高的精度和准确性,并具有可满足各种目的的特定功能。当需要全海底声波探测时,MBES 已成为深度测定的宝贵工具。数字回声测深仪与运动传感器、卫星定位系统(如 GPS)和数据采集软件的使用相结合,优化了生产效率,并相应减少了测量操作人员。越来越多的国家水文局 (NHO) 采用多波束技术作为收集新海图制作的水深数据的首选方法。
第 3 章 深度测定
第 3 章 深度测定 1.简介 深度测定是水文测量员的一项基本任务,需要对介质、水下声学、可用于深度测量的大量设备、用于姿态和升沉测量的互补传感器以及适当的程序有具体的了解,以达到并满足国际推荐的精度和覆盖标准,如 IHO 出版物 S-44 第 5 版所述。铅垂线和测深杆是最早用于直接测量水深的方法。它们的简单操作原理确保了它们在许多世纪中持续使用。源自军用声纳的单波束回声测深仪是一项重大发展,自 20 世纪中期以来一直用于水文测量。在过去十年中,水文测量在深度测量技术和方法方面经历了概念上的转变。多波束回声测深仪 (MBES) 和机载激光测深系统 (ALS) 现在几乎可以覆盖整个海底并进行深度测量。高数据密度和高采集率产生了巨大的测深数据集和大量辅助数据。1998 年,编写第 4 版的 S-44 工作组对深度测量设备的最新技术进行了评估,结果如下:“单波束回声测深仪在浅水中的精度已达到亚分米级。市场上有各种不同频率、脉冲率等的设备。可以满足大多数用户,尤其是水文学家的需求。(…) 多波束回声测深仪技术正在迅速发展,如果使用适当的程序,并且系统的分辨率足以正确检测航行危险,则多波束回声测深仪技术具有进行准确和全面海底搜索的巨大潜力。机载激光测深是一项新技术,可以为浅水清澈水域的调查提供显着的生产力提升。机载激光系统能够测量 50 米或更深的深度。”尽管有这些新技术,但单波束回声测深仪 (SBES) 目前仍然是全球水文调查中使用的传统设备。这些回声测深仪也从模拟记录发展到数字记录,具有更高的精度和准确性,并具有可满足各种目的的特定功能。当需要全海底声波探测时,MBES 已成为深度测定的宝贵工具。数字回声测深仪与运动传感器、卫星定位系统(如 GPS)和数据采集软件的使用相结合,优化了生产效率,并相应减少了测量操作人员。越来越多的国家水文局 (NHO) 采用多波束技术作为收集新海图制作的水深数据的首选方法。
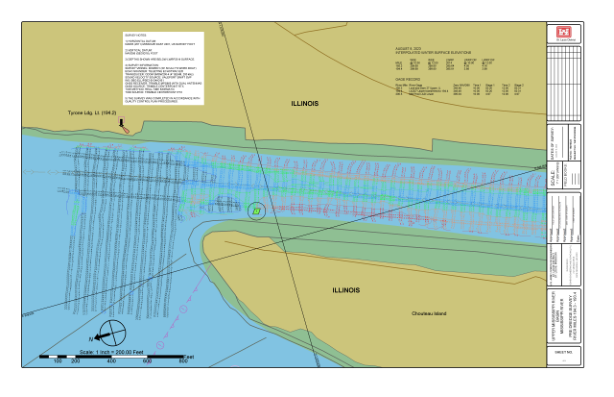
测量说明: - 1) 水平基准
2023 年 8 月 8 日 — 4) 调查信息:调查船:BOWEN1(24' SCULLY 工作船)。回声测深仪:TELEDYNE ECHOTRAC E20。换能器:ODOM SMSW200-4(4° 波束,200 kHz)。
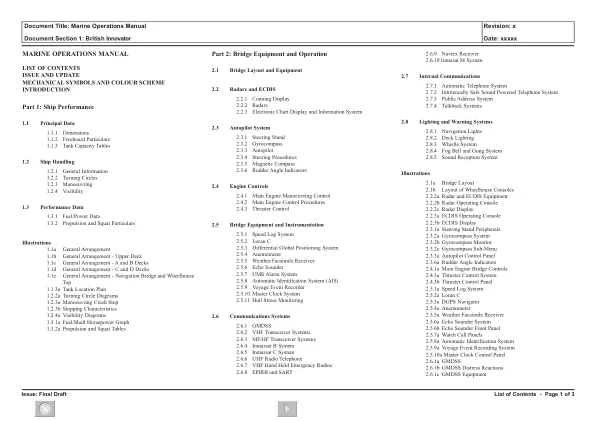
海上作业手册文件第 1 部分
2.1a 舰桥布局 2.1b 驾驶室控制台布局 2.2.2a 雷达和 ECDIS 设备 2.2.2b 雷达操作台 2.2.2c 雷达显示器 2.2.3a ECDIS 操作台 2.2.3b ECDIS 显示器 2.3.1a 操舵台外围设备 2.3.2a 电罗经系统 2.3.2b 电罗经监视器 2.3.2c 电罗经子菜单 2.3.3a 自动驾驶仪控制面板 2.3.6a 舵角指示器 2.4.1a 主机舰桥控制装置 2.4.3a 推进器控制系统 2.4.3b 推进器控制面板 2.5.1a 速度计系统 2.5.2a Loran C 2.5.3a DGPS 导航仪 2.5.4a 风速计2.5.5a 气象传真接收器 2.5.6a 回声测深仪系统 2.5.6b 回声测深仪前面板 2.5.7a 值班呼叫面板 2.5.8a 自动识别系统 2.5.9a 航行事件记录系统 2.5.10a 主时钟控制面板 2.6.1a GMDSS 2.6.1b GMDSS 遇险反应 2.6.1c GMDSS 设备

文章 用于浅水测深评估的创新海上无人系统和卫星解决方案
摘要:浅水测深是土木工程、港口监测和军事行动等各个领域的重要研究课题。本研究介绍了几种使用海上无人系统 (MUS) 评估浅水测深的方法,该系统集成了先进和创新的传感器,例如光探测和测距 (LiDAR) 和多波束回声测深仪 (MBES)。此外,本研究全面描述了同一地理区域内的卫星测深 (SDB) 技术。每种技术都从其实施和结果数据方面进行了全面概述,然后对其准确性、精确度、快速性和操作效率进行了分析比较。在 MUS 调查之前,使用传统方法进行的水深参考调查以及所有方法之间的交叉比较来评估方法的准确性和精确度。在对调查方法的每次评估中,都会进行全面的评估,解释每种方法的优点和局限性,从而使读者能够全面了解这些方法的有效性和适用性。该实验是作为“使用海上无人系统 23 的机器人实验和原型设计”(REPMUS23)多国演习的一部分进行的,该演习是快速环境评估 (REA) 实验的一部分。

迈向自主远洋观测站 - HAL
摘要 本研究介绍了一种综合方法,用于在漂流的 FAD 附近进行光学、回声测深仪和水肺观测,以对鱼类聚集装置 (FAD) 进行现场监测。根据所使用的设备,声学方法可以描述生物散射层、单个鱼类、鱼群、鱼群和哺乳动物的空间组织和动态,而视觉、摄影和视频观察则可以在 0 到 ~ 25 米的范围内识别物种。基于这些结果,我们阐述了结合声学和视觉方法的兴趣,并提出了一种自主仪器漂流浮标,用于远程监测远洋生态系统中的鱼类多样性和丰度。我们还强调了在生态系统方法中自主收集大量可用于生态和渔业研究的基本信息的前景,包括公海和沿海远洋环境。作为展望,我们提出了 B Seaorbiter ^ 一个未来派的大型漂流平台,它将允许进行创新的生态系统研究,同时考虑远洋生态系统的所有宏观组成部分。

附录 D:太平洋外大陆架作业的典型最佳管理实践
为避免对受保护的海洋哺乳动物物种造成伤害并将任何潜在干扰降至最低,将对所有操作脉冲式测量设备的船只实施以下措施,这些设备发出的声音频率范围小于 180 kHz(在海洋哺乳动物和海龟的功能听力范围内),以及 CHIRP 海底剖面仪(这不适用于参数海底剖面仪、超短基线、回声测深仪或侧扫声纳;声学特性(频率、窄波束宽度、快速衰减)不会对受保护物种产生影响)。清除区是指在声源开启前 30 分钟内,声源周围需要目视清除 ESA 所列物种的区域。清除区相当于开始测量操作的最小能见度区域(见下文第 1 条)。关闭区是指声源周围必须进行监控的区域,一旦检测到 ESA 所列鲸鱼物种进入该区域或在该区域内,则可能关闭该区域。对于清理区和关闭区来说,这些都是最小能见距离,为了了解情况,PSO 应该尽可能观察该区域以外的情况。