XiaoMi-AI文件搜索系统
World File Search System坐标轴

传感器至机身的对称性校准程序...
固定翼 UAV 设计通常相对于纵向平面对称,即机身左侧与右侧对称。目的是使广义气动力对称,以便在任一方向转弯时具有等效机动能力。为了确定给定机身设计的力,工程师通常会收集风洞测试或飞行实验中捕捉力的数据。无论哪种情况,我们都会期望力的大小相等,以对称使用执行器并镜像对称平面上的相对速度。然而,当力和力矩测量设备的坐标轴与机身固定坐标系的坐标轴不对齐时,收集到的数据并非如此(通常情况如此)。这种不对称随后会传递到已识别的模型,并可能对基于模型的控制造成问题,而这正是我们所针对的用例。通过仔细的安装程序可以将错位保持在较小水平,这样就可以通过适当的后处理校准剩余的不对称性。然而,似乎没有一种系统性的校准方法来做到这一点
消失的点,分析绘画的计算机愿景...
单点透视:当图像平面平行于两个世界坐标轴时,与该图像平面切割的轴平行的线将具有在单个消失点相遇的图像。线平行于其他两个轴线不会形成消失点,因为它们是平行于图像平面的。
传感器至机身的对称性校准程序...
固定翼 UAV 设计通常相对于纵向平面对称,即机身左侧与右侧对称。目的是使广义气动力对称,以便在任一方向转弯时具有等效机动能力。为了确定给定机身设计的力,工程师通常会收集风洞测试或飞行实验中捕捉力的数据。无论哪种情况,我们都会期望力的大小相等,以对称使用执行器并镜像对称平面上的相对速度。然而,当力和力矩测量设备的坐标轴与机身固定坐标系的坐标轴不对齐时,收集到的数据并非如此(通常情况如此)。这种不对称随后会传递到已识别的模型,并可能对基于模型的控制造成问题,而这正是我们所针对的用例。通过仔细的安装程序可以将错位保持在较小水平,这样就可以通过适当的后处理校准剩余的不对称性。然而,似乎没有一种系统性的校准方法来做到这一点
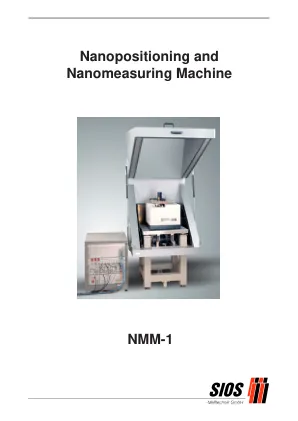
纳米定位和纳米使用机器NMM-1
纳米定位和纳米轴承机用于在25 mm x 25 mm x 5 mm的范围内进行三维坐标测量,分辨率为0.1 nm。其独特的sens sentement在所有三个坐标轴上都提供了无误差测量。用于长度测量值的三个微型平面镜面干涉仪的测量轴实际上与探针传感器的接触点与单个点的测量对象相交。