XiaoMi-AI文件搜索系统
World File Search System大自然
生物多样性网络|萨福克中期
生物多样性网络旨在通过计划过程来最大限度地利用机会,以识别,映射和保护本地野生动植物富裕栖息地和更广泛的生态网络,并符合NPPF的第174A段。这有助于实施政府报告“为大自然腾出空间:对英格兰野生动植物遗址和生态网络的审查”(Lawton,2010年)的建议,通过将现有栖息地联系起来,创建更多的栖息地,缓冲栖息地,以使其更大的栖息地更大,并为大自然提供更好的栖息地,使他们更加弹性。这与NPPF Para 174B(即促进优先栖息地,生态网络以及优先物种的保护和恢复的保护,恢复和增强;并通过木板过程确定并寻求机会为生物多样性获得可衡量的净收益。

站点可再生能源正确方法
场地可再生能源权利:加速美国中部清洁绿色可再生能源建设 大自然保护协会。2022 年 2 月 1 日。场地可再生能源权利:加速美国中部清洁绿色可再生能源建设。大自然保护协会的大平原可再生能源计划。http://www.nature.org/siterenewablesright 简介 大自然保护协会支持可再生能源的快速扩张,同时保护野生动物和自然栖息地。本文总结了保护协会场地可再生能源权利分析中包含的数据和假设,以及我们打算如何使用结果。场地可再生能源权利分析包括与风能和光伏 (PV) 太阳能开发相关的关键野生动物区域的地图,这些地图可用于通过优先考虑避免区域来确定项目不太可能遇到重大野生动物相关冲突、延误和成本超支的区域。这些地图旨在作为重要的信息来源,为项目选址过程的早期筛选提供信息。它们可用于为电力购买者提供尽职调查分析,并支持州和联邦可再生能源选址指导的应用,例如美国鱼类和野生动物管理局的陆基风能指南。通过将风能的主要野生动物避风区与其他土地适宜性因素相结合,我们证明,美国中部地区可以开发超过 1,000 GW 的风能,这些风能仅存在于保护影响较小的地区。结果表明,我们可以加速实现清洁、低影响的能源未来——既能推进能源和气候目标,又能避免对野生动物及其栖息地产生影响。
krasmulti抑制剂BI 3706674在kras- ...
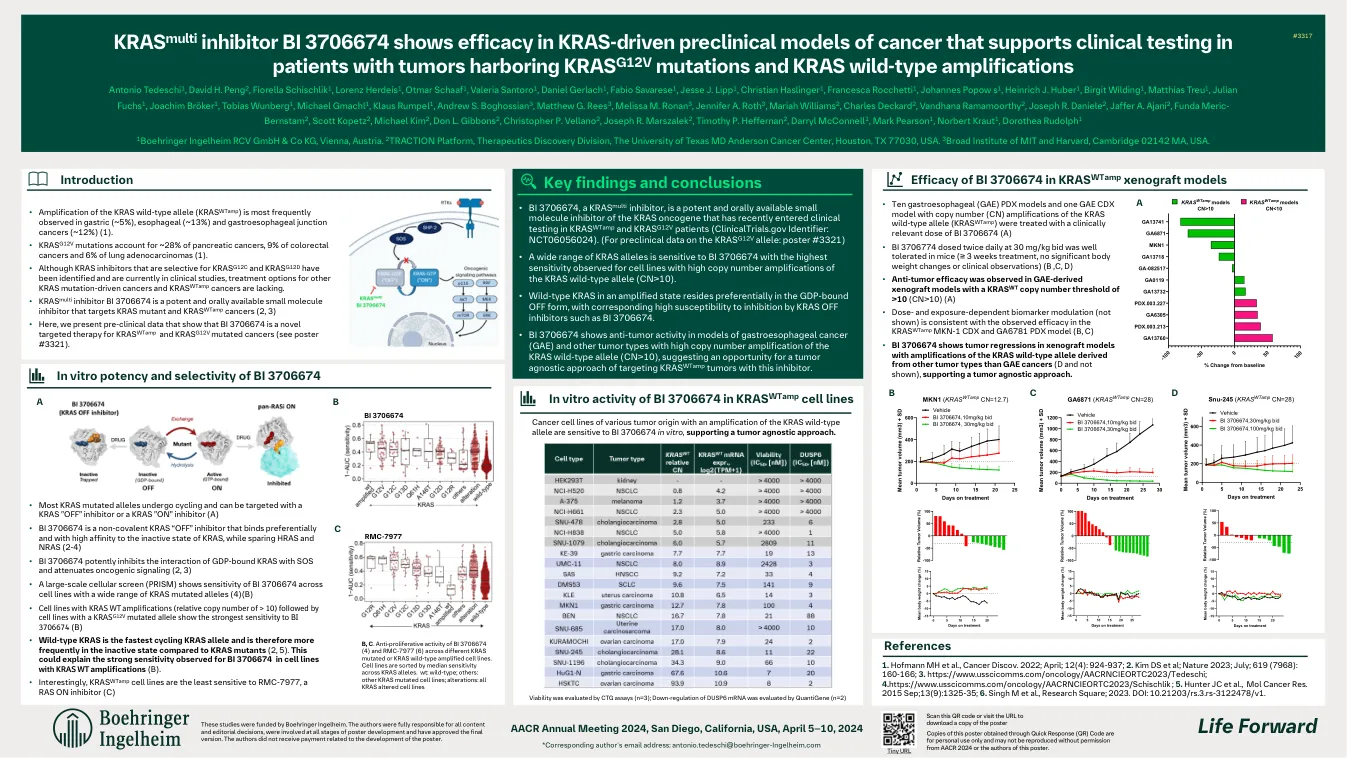
1。Hofmann MH等人,癌症疾病。2022;四月; 12(4):924-937; 2。Kim DS等人;大自然2023;七月; 619(7968):160-166; 3。https://www.usscicomms.com/oncology/aacrncieortc2023/tedeschi; 4。https://www.usscicomms.com/oncology/aacrncieortc2023/schischlik; 5。 Hunter JC等人,Mol Cancer Res。 2015年9月; 13(9):1325-35; 6。 Singh M等人,研究广场; 2023。 doi:10.21203/rs.3.RS-3122478/V1。Kim DS等人;大自然2023;七月; 619(7968):160-166; 3。https://www.usscicomms.com/oncology/aacrncieortc2023/tedeschi; 4。https://www.usscicomms.com/oncology/aacrncieortc2023/schischlik; 5。Hunter JC等人,Mol Cancer Res。2015年9月; 13(9):1325-35; 6。 Singh M等人,研究广场; 2023。 doi:10.21203/rs.3.RS-3122478/V1。2015年9月; 13(9):1325-35; 6。Singh M等人,研究广场; 2023。doi:10.21203/rs.3.RS-3122478/V1。
综合计划策略审查规划委员会...
确定可加强野生动物走廊的位置,以帮助为物种在气温升高时迁徙和向北迁移创造场所并保护这些地区。大自然保护协会的弹性土地制图工具是识别弹性和连通网络的良好资源。PB、CC 和 PD
一种基于科学的方法来审核您的自然景观。
创建健康的生物多样性状态当然对于生产性农业制度也是至关重要的。英国2019年大自然报告显示,有70%的英国动物和植物物种正在下降,因此,对于乡村房地产和农场经理来说,它越来越重要,可以采用可以帮助保护和发展周围生物多样性的农业策略。

自然健康服务
执行摘要 4 简介 7 大自然对人类健康的益处,以及如何将其体现在健康经济学中 7 野生动物信托基金及其在绿色处方中的作用 7 健康不平等和大自然带来的机遇 7 本研究和报告大纲 8 量化和货币化健康影响的方法回顾 9 项目和案例研究选择 10 确定的绿色处方项目 10 数据收集 11 选择用于分析的案例研究和应用的方法 12 案例研究结果 13 绿色处方案例研究 - 内心狂野 13 孤独案例研究 - 喂鸟 14 解决心理健康问题的案例研究 15 伯里的早期干预 15 大曼彻斯特的自然健康 17 身体健康案例研究 - 野生健康 19 估计在英国范围内推行绿色处方的成本和潜在收益的大小 21 绿色处方及其对克服健康不平等的贡献 23 总结结果、经验教训和建议 25
2020 年 8 月 - 全球安全
这项研究得到了 25 位审阅者的大力帮助,他们慷慨地贡献了自己的时间以提高工作的准确性和清晰度,其中包括 Dick Cameron(大自然保护协会)、Ed Rubin(卡内基梅隆大学)、Emily McGlynn(加利福尼亚大学戴维斯分校)、Granger Morgan(卡内基梅隆大学)、Hanna Bruenig(劳伦斯伯克利国家实验室)、Jan Mazurek(气候工作基金会)、Jeremy Martin(忧思科学家联盟)、Julia Levin(加利福尼亚生物能源协会)、Lynn Brickett(能源部)、Mark Rigby(底特律爱迪生能源服务公司)、Michelle Passero(大自然保护协会)、Sarah Forbes(能源部)、Shaffiq Jaffer(道达尔)、Ian Rowe(能源部)、James Mulligan(世界资源研究所)、Emily Wimberger(荣鼎集团)、Ryan McCarthy(威德曼集团公司)和 Rob Oglesby。
自然刺激具有特殊教育需求的儿童的学习和成长
该项目的工作已经确定,应为所有儿童提供自然界的各种感官印象和积极的经历,包括患有更严重的发育障碍,流动性障碍或多种残疾儿童。在此过程中,这些孩子需要根据他们的能力和技能的不同形式的帮助,指导或其他鼓励。大自然提供了宁静和时间,让他们以自己的节奏发现事物。此外,新鲜的空气并与大自然所提供的一切一起玩耍,以额外的能量充满。它可以鼓励他们探索,冒险,玩,学习和做更多的事情。基于他们与儿童的具体工作,老师经常报告说,在自然界活动中,孩子的成长是完全意外的飞跃,他们很可能在课堂上永远不会实现或注意到这一点。同时,老师和看护者已经意识到,在为孩子们准备自然界的活动并寻找调整和解决方案的同时,考虑到小组中儿童的能力和技能,他们也开始更深入地体验和观察自然。
![B.Sc.林业[八(8)个学期]基于选择的信用系统(CBC)
修订的日期表H.N.B. Garhw al Central University,Srinagar(Garhw al)M.A。第三学期(主/背部/特别背部)考试时间表(第2届会议
B.Sc. V学期:核心学科(化学)(NEP)
Manisha Nigam博士地址:生物化学系
'日期表H.N.B.加尔瓦尔大学(Garhwal University),斯利那加(Garhwal)(Garhwal)M.A。第三学期(主/背部/特别背部)考试时间表(会议2024-25)(时间:0](/simg/8\8a8ab8ac0c8e68c02708488f45d79e66eb1c3aa5.webp)
B.Sc.林业[八(8)个学期]基于选择的信用系统(CBC) 修订的日期表H.N.B. Garhw al Central University,Srinagar(Garhw al)M.A。第三学期(主/背部/特别背部)考试时间表(第2届会议 B.Sc. V学期:核心学科(化学)(NEP) Manisha Nigam博士地址:生物化学系 '日期表H.N.B.加尔瓦尔大学(Garhwal University),斯利那加(Garhwal)(Garhwal)M.A。第三学期(主/背部/特别背部)考试时间表(会议2024-25)(时间:0
Current trends in Pharma and Pharmaceutical sciences • www.medcavepublications.org • European journal of biomedical research https://www.ejbmr.com Reviewer of International Journals Trends in Cell Biology, Elsevier Biochimie, Elsevier Arabian Journal of Chemistry, Elsevier Food Bioscience, Elsevier Journal of Ethnopharmacology, Elsevier Heliyon, Elsevier Food and Humanity, Elsevier Microbial Pathogenesis, Elsevier Scientia Horticulturae, Elsevier Saudi Pharmaceutical Journal, Elsevier Journal of Pharmaceutical Analysis, Elsevier Evidence-Based Complementary and Alternative Medicine, Hindawi Food Science and Nutrition, Wiley BioFactors, Wiley Toxin Reviews, Taylor and Francis Critical Reviews in Food Science and Nutrition,泰勒(Taylor)和弗朗西斯(Francis)应用生物化学和生物技术,人类新闻媒体发现植物,施普林格自然癌细胞国际,施普林格大自然naunyn-schmiedeberg的药理学档案,施普林格大自然医学肿瘤学,Springer Nature discution肿瘤学,Springer Nature
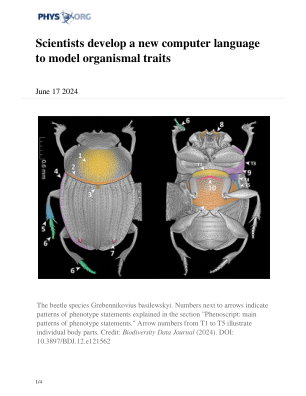
科学家开发出一种新的计算机语言来模拟生物体特征
大自然最美丽的一面是生物体展现出无穷无尽的形状、颜色和行为。这些特征有助于生物体生存和寻找配偶,例如雄孔雀多彩的尾巴如何吸引雌孔雀,或者它的翅膀如何帮助它飞离危险。了解特征对于生物学家来说至关重要,他们研究这些特征是为了了解生物体如何进化并适应不同的环境。