XiaoMi-AI文件搜索系统
World File Search System太慢
可植入的心脏逆转除颤器(ICD)
心脏是一种肌肉,可以将血液和氧气在您的身体周围泵入所有重要器官。它有四个腔室,顶部有两个(右侧和左心房),底部有两个(右心室和左心室)。心脏还具有一个电气系统,它通过心脏发出冲动(节拍),导致其收缩并在体内抽血。每个正常的心跳始于心脏的天然起搏器(中环或SA节点),位于右心房顶部。它穿过两个顶部腔室,并穿过上和下腔之间的小连接(室内或AV节点)。然后,它散布在底部腔室(心室),导致心脏收缩并通过右心室将血液泵入肺部,并通过左心室在体内含氧血液。有时您心脏中的电气系统无法正常工作,导致您的心脏跳动太快或太慢。除颤器可以阻止从心室开始的快速心律。这种快速心律称为心室心动过速或VT。
人工智能治理格局
建议人:埃马纽埃尔·马克龙、乌尔苏拉·冯德莱恩、里希·苏纳克、穆斯塔法·苏莱曼(DeepMind 联合创始人)、埃里克·施密特(谷歌前首席执行官)等。这可能是最常被提及的机构模式。该模式:一个政府间机构,汇集国际专家评估科学证据,制定科学共识并提出政策相关建议。没有法律条约。优点:可以促进国际共识的建立,充当前沿人工智能系统知识的管理者,并提供有关人工智能风险和机遇的权威(科学严谨)信息。它将成为政策制定者有用、可靠的专业知识来源,可以对广大公众发挥教育作用,并激励进一步的学术研究。缺点:鉴于对先进人工智能的科学评估处于早期阶段,缺乏关于其风险的确凿证据,这样的机构可能很难达成共识(或者达成共识的速度太慢)。它还缺乏特定的受众(IPCC 直接向《联合国气候变化框架公约》提供信息)。

使用硬件优化 ARINC 661 的 OpenGL 渲染...
摘要 本文讨论了飞行员显示可视化速度的问题。航空电子设备中使用的软件必须遵循许多标准规定的严格规则。研究使用了 OpenGL Safety Critical (SC),并在飞机实时操作系统 JetOS 中运行 Vivante GPU 硬件支持。航空电子标准之一 ARINC 661 定义了在驾驶舱显示系统中呈现的应用程序。它提出了高效使用 OpenGL SC 以确保可接受的可视化速度的问题。由于 ARINC 661 服务器准备的应用程序的特殊性,未来飞机平台(带有 Vivante GPU 的 i.MX6 处理器)的可视化速度太慢,无法满足航空要求。我们提出并实施了一种高效的可视化速度加速算法。首先优化了 OpenGL 调用。但这种优化不能直接集成到 ARINC 661 服务器中。因此,我们设计并阐述了一个特殊的中间模块。所提出的方法可以实现飞机飞行员显示器可接受的可视化速度。关键词 1 飞行员显示,可视化速度,实时操作系统,OpenGL Safety Critical,GPU加速,ARINC 661服务器

无论阿富汗发生什么,如果有
尽管拜登政府数月来一直承认不撤离这些人会带来重大安全风险,但迄今为止,它仍未努力优先撤离美国训练的阿富汗突击队和其他精锐部队,这些人掌握着有关美国军事行动的敏感信息。其中许多人员被迫在伊朗寻求庇护,在那里,他们的信息可能被利用。拜登政府一再无视撤离前口译员和其他处于危险中的盟友的行动太慢的警告,无视关岛提出的作为这些 SIV 申请人临时处理设施的提议。同样,美国政府拒绝了巴基斯坦提出的在近东救济工程处期间将一处设施作为撤离人员中转设施的提议,尽管卡塔尔和德国的其他中转设施已达到容量上限,从而减缓了撤离进程 拜登政府一再误导美国人民了解喀布尔当地的真实情况,发表的公开声明与国务院和美国军方发送的内部报告直接对立 尽管拜登政府声称对撤军进行了严格的审议,但高级官员承认,高级军事顾问、外交官和盟友的建议被忽视了
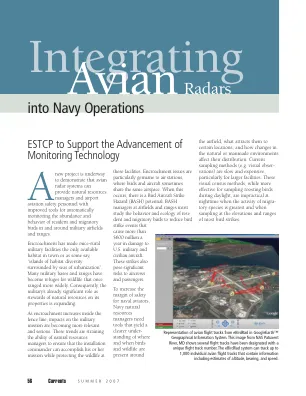
Sum07_将 Avian 雷达整合到海军行动中
2000 财政年度,美国国防部 (DoD) 遗产计划办公室为南卡罗来纳州克莱姆森大学雷达鸟类学实验室 (CUROL) 提供了资金,以开发一种能够探测机场鸟类的鸟类雷达系统,从而减少鸟击的发生。最初的 BirdRad 系统旨在成为一种廉价的移动式鸟类雷达。它包括一个低成本的商用海事雷达,配备 4 度波束宽度抛物面天线(以获得更好的高度分辨率)和一台台式个人计算机,用于在图形文件中显示和捕获雷达图像。CUROL 建造了五个 BirdRad 系统,部署在三个海军、一个海军陆战队和一个空军基地。虽然 BirdRad 在探测零到六海里范围内的鸟类方面非常有效,但它有几个局限性。主要是来自静止物体(“地面杂波”)的雷达回波会遮挡移动目标;从屏幕截图中提取目标轨迹太慢并且需要大量劳动力,无法追踪许多种类的鸟类;并且很难将屏幕上的目标与周围的景观联系起来。
医疗保健领域的 ICT 标准化战略和服务创新
传统上,标准是在国际标准化组织 (ISO) 等标准化机构的框架内制定的。此类机构有详细的规则,规定应如何组织活动、允许哪些人参与、投票规则、标准规范必须满足的标准才能获得批准等。标准是根据对用户未来需求的预测而制定的。然后,希望标准能够在预期用户采用的解决方案中实施。这就是电信等行业内制定标准的方式。当标准成为该行业的一个重要问题时,IT 行业也采用了这种策略。然而,大多数标准化机构的正式方法通常被认为对 IT 行业来说太慢和官僚主义。因此,在许多情况下,各种联盟模式更受青睐。互联网社区遵循另一种标准化策略。在这里,标准的制定和确定采用一种更自下而上的方法。一项标准只有在以下两个条件满足后才会最终获得批准:首先,需要该标准的解决方案的实际使用证明了其必要性;其次,该标准的几种独立实现已经证明可以互操作。

FastField:用于有效近似深部脑刺激电场的开源工具箱
深部脑刺激 (DBS) 是一种通过电调节神经组织来缓解某些脑部疾病症状的外科疗法。预测电场和激活组织体积的计算模型是有效参数调整和网络分析的关键。目前,我们缺乏支持复杂电极几何形状和刺激设置的高效灵活软件实现。现有工具要么太慢(例如有限元法 - FEM),要么太简单,对基本用例的适用性有限。本文介绍了 FastField,一个用于 DBS 电场和 VTA 近似的高效开源工具箱。它根据叠加原理计算可扩展的电场近似,并根据脉冲宽度和轴突直径计算 VTA 激活模型。在基准测试和案例研究中,FastField 的求解时间约为 0.2 秒,比使用 FEM 快 ∼ 1000 倍。此外,它几乎与使用 FEM 一样准确:平均 Dice 重叠度为 92%,这大约是临床数据中发现的典型噪声水平。因此,FastField 有潜力促进有效的优化研究并支持临床应用。

生物面部处理中的高效逆图形
视觉不仅可以检测和识别物体,还可以对导致我们看到的光图案的底层场景结构进行丰富的推断。反转生成模型或“综合分析”提供了一种可能的解决方案,但其机械实现通常对于在线感知来说太慢,并且它们与神经回路的映射仍不清楚。在这里,我们提出了一种神经上合理的高效逆向图形模型,并在人脸识别领域对其进行了测试。该模型基于一个深度神经网络,该网络可以学习在一次快速前馈过程中反转三维人脸图形程序。它定性和定量地解释了人类行为,包括经典的“空心脸”错觉,并直接映射到灵长类动物大脑中专门的面部处理电路上。与最先进的计算机视觉模型相比,该模型更适合行为和神经数据,并提出了一种可解释的逆向工程来解释大脑如何将图像转化为感知。

一种实用方法,可以覆盖具有群体的动态区域
摘要 - 许多应用程序需要探索或监视区域。这可以通过传感器网络来实现,传感器网络是一大批机器人团队,每个机器人只能覆盖一个很小的分数。当该区域是凸,小且静态的时,将机器人部署为质心Voronoi tessellation(CVT)。相反,我们认为要覆盖的区域宽,不一定是凸面和复杂。然后,操纵一个较小的简单区域并变形以横切整个区域。向机器人提供了一些描述该区域的路点。目标是机器人在CVT附近均匀地在该区域上动态部署。不幸的是,分布式CVT计算算法的收敛太慢,无法实用。在这项工作中,CVT计算与基于反馈和基于前馈的控制技术和动态共识相辅相成,以调整机器人速度,以便它们协调以覆盖动态区域。我们在模拟中证明了所提出的方法成功地实现了跟踪该区域的目标,并通过机器人均匀部署,同时保持连通性并避免碰撞。我们还比较了所提出的方法与其他替代方案的性能。
测试策略和管理测试焦虑的技巧
•尝试避免连续跳过三个问题。,如果您由于高水平的测试焦虑而跳过前三个,这似乎是减轻焦虑的一种方法(跳过问题,直到您发现“ gimme”问题)最常常会加剧测试焦虑。如果您不确定前三个问题上的答案,请尝试至少回答前三个问题之一,并将其标记,然后返回到以后的问题。•放慢脚步 - 有意识,有意努力使您的感觉慢慢慢,好像您正在阅读问题太慢。在阅读时,尝试用手指/铅笔在问题中触摸每个单词。•花2或3分钟在刮擦纸上写下您所记得的有关您正在测试的主题的所有内容。您所写的内容不必与您要回答的问题有关。研究表明,写作行为(实际上,只要与受考试有关的主题有关)可以缓解测试焦虑,以便学生可以再次“思考”并开始回答问题。•闭上眼睛,深呼吸2-3个。•练习积极的自我谈话(“您可以做到这一点”)来抵抗您拥有的任何负面想法。