XiaoMi-AI文件搜索系统
World File Search System子组件

“WithTM 时代”:人类与机器
组织正在以各种方式使用数字孪生功能。在汽车、航空、农业、教育、能源和医疗保健等领域,数字孪生功能正在优化价值链并创新新产品。数字孪生可以模拟物理对象或过程的各个方面,并表示工程图或子组件以及新产品在更广泛供应链(从设计表到消费者)中的相应谱系。数字孪生可能有多种形式,但它们都捕获和利用代表物理世界的数据。
技术规格 - Mercell
3 功能要求 ................................................................................................ 15 3.1 基本功能 ................................................................................................ 15 3.2 PAR 功能 ................................................................................................ 15 3.3 PSR 功能 ................................................................................................ 19 3.4 SSR 功能 ................................................................................................ 19 3.5 模拟器功能 ............................................................................................. 20 3.6 与 MIL i-ATC 的接口 ............................................................................. 22 3.7 数据通信 ............................................................................................. 23 3.8 系统操作员角色 ............................................................................................. 25 3.9 系统状态 ............................................................................................. 27 3.10 功能监控 (FM) 和内置测试 (BIT) ............................................................. 28 3.11 子组件 ............................................................................................. 29 3.12 信息安全 ............................................................................................. 29
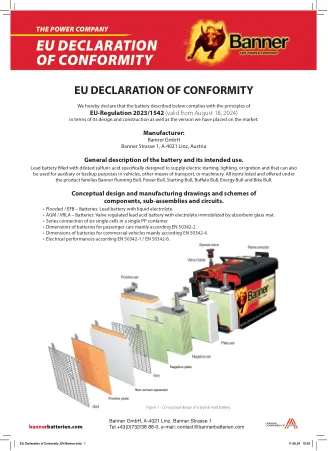
EU的合格声明 一般信息
概念设计和制造图以及组件,子组件和电路的方案。•洪水 / EFB - 电池:用液体电解液引导电池。•AGM / VRLA - 电池:阀调节的铅酸电池,用吸收性玻璃垫子固定的电解液。•单个PP容器中六个单元格的串联连接。•乘用车的电池尺寸主要是根据EN 50342-2。•商用车的电池尺寸主要是根据EN 50342-4。•根据EN 50342-1 / EN 50342-6进行电气表演。

MIL-STD-1519.pdf - DSI International
目录 封面 批准单 接收索引 配置文档 通用数据 uUT 设计数据 uUT 测试数据 uUT 接口要求 电气接口 机械接口 性能特性 测试信息 图纸 外形图 单元(主)装配图 详细和附加图 模块/子组件示意图 内部/计算机接线图 低电压示意图 子组件图 接线图 功能块图 测试缺陷图 配置通道 TRD 修订版 TRC 编号 0ss lgn=nc TRD 完整性

联想 ThinkSystem ST650 V3 服务器
主动平台警报(包括 PFA 和 SMART 警报):处理器、稳压器、内存、内部存储(SAS/SATA HDD 和 SSD、NVMe SSD、M.2 存储、闪存适配器)、风扇、电源、RAID 控制器、服务器环境和子组件温度。警报可以通过 XClarity Controller 发送给 Lenovo XClarity Administrator、VMware vCenter 和 Microsoft System Center 等管理器。这些主动警报可让您在可能发生故障之前采取适当的措施,从而增加服务器正常运行时间和应用程序可用性。

如何使用3层阅读模型动作计划工具
目的该行动计划是一种工具,旨在帮助学校和团队确定实施或增强3层阅读模型组成部分所需的基本步骤,以此作为对干预的响应的一个例子。该工具为教学领导者提供了一种记录的方法:(a)每个组件和关键子组件的当前状态,(b)需要改进每个组件的领域,(c)要采取的措施以满足确定的需求和负责的人,以及(d)日期该诉讼已完成。
DoDI 4151.26,国防部跨部门维修站维护,2022 年 10 月 31 日
物资维护或修理过程涉及武器系统、设备最终产品、零件、部件、组件或子组件的大修、升级、重建、测试、检查和回收(如有必要)。仓库维护还包括软件维护的所有方面;安装零件或组件进行改造;以及向中间维护组织、作战单位和其他活动提供技术援助。DMISA 正式的多年期协议,其中一方(例如军事部门)(代理人)同意为另一方(委托人)提供军事物资的仓库维护。当军事部门是代理人而另一个联邦机构是委托人时,也可以使用它。
故障模式调查以实现 LiDAR 健康监测
光检测和测距 (LiDAR) 传感器是感知系统的关键组件,可实现自动驾驶。鉴于 LiDAR 的故障率高于摄像头和雷达等其他传感器,因此监控此组件的健康状况对于提高自动驾驶功能的可用性至关重要。这样的健康监测系统可以为零售和车队提供经济高效的维护,改善零售客户的服务体验,并确保 LiDAR 生成的数据在工程开发中的保真度。由于 LiDAR 在汽车应用中相对较新,因此目前在 LiDAR 健康监测方面的工作有限,其故障模式和退化行为尚未在文献中得到彻底研究。本文回顾了 LiDAR 的外部和内部故障模式及其对感知性能的影响。外部故障模式分为多个故障类别,例如由于传感器上的一层碎片导致的传感器堵塞、传感器盖的机械损坏以及安装问题。针对各种类型的 LiDAR(包括机械旋转式、闪光式和微机电镜 LiDAR),探索了与发射器、接收器或扫描机制等 LiDAR 子组件相对应的内部故障。还研究了每个子组件的故障模式,以确定它们是否可以归类为缓慢退化或突然故障。结论是,机械旋转式 LiDAR 比闪光式 LiDAR 更容易出现故障模式。内部和外部 LiDAR 故障模式都会导致检测物体和障碍物的准确性和可靠性降低,危及自动驾驶系统的安全性,并增加发生碰撞的可能性。

Lenovo Thinksystem SR780A V3服务器
主动平台警报(包括PFA和智能警报):处理器,电压调节器,内存,内部存储(SAS/SASA/SATA HDDS和SSD,NVME SSD,M.2存储,闪存存储适配器),风扇,电源,电源,服务器,服务器环境和子组件温度。警报可以通过XCLARITY控制器浮出水面,例如Lenovo XClarity管理员,VMware Vcenter和Microsoft System Center等经理。这些主动的警报可让您在可能的故障之前采取适当的操作,从而增加服务器正常运行时间和应用程序可用性。