XiaoMi-AI文件搜索系统
World File Search System崎岖地形
RobotEye 技术入门 - Ocular Robotics
对于除持续“全场”扫描之外的所有用例,孔径加速能力都至关重要。对于涉及稳定、跟踪、测绘、瞄准等许多应用,快速改变方向的能力至关重要。图 2-4 显示了测试中一系列移动过程中的方位角和仰角孔径加速度分量,从图中可以看出,在测试过程中,孔径加速度经常超过 60,000°/s 2 。实际上,这种加速能力提供了其他方法无法实现的响应能力,使从高度不稳定的平台(例如在崎岖地形上快速移动的地面车辆和小型水面舰艇)获得稳定视觉成为可能,实现无延迟远程呈现、多目标跟踪等。

CSM Randolph Delapena 目前担任第 82 空降师的高级士兵顾问北卡罗来纳州布拉格堡分部。
CSM Delapena 的军事教育包括:第 7 军初级领导力发展课程(荣誉毕业生和领导力奖)、战斗工程师基本士官课程(荣誉毕业生和领导力奖)、战斗工程师高级士官课程(荣誉毕业生和领导力奖)、美国陆军士官学院第 64 班(指挥官名单)、提名领导者课程、联合参谋部 Keystone 课程、美国陆军教练士官学校(领导力奖和指挥官名单)、基础空降课程、布拉格堡轻武器大师级炮手课程、跳伞长学校、路线清理规划课程、空降崎岖地形跳伞员认证、大师级复原力训练师课程。他以优异成绩毕业于 Excelsior 学院的历史学学士学位。
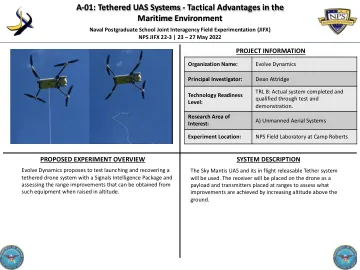
系留 UAS 系统 - 海上战术优势...
GreenSight LEANIS 系统是一种模块化多无人机发射和回收系统,专为高动态移动平台而设计,例如在高海况或崎岖地形上高速行驶的小型无人或载人船舶和地面车辆。主要子系统包括多架长航时 GreenSight Dreamer 无人机、多自由度机械臂、可堆叠的无人机存储和充电舱、无人机跟踪传感器、通信和计算单元以及电源单元。LEANIS 的突出功能是它能够在高动态平台上运行,使用机载惯性传感器和机械臂来取消车辆的运动,为无人机提供稳定的连接点。此功能使 LEANIS 能够快速自主地发射和回收整个无人机群,而不会中断车辆上的现有操作。

新闻稿 - 武装部队部
2022 年 7 月 26 日,法国军备局 (DGA) 批准了作战降落伞着陆系统 (SMTCOPS),这是一种用于可控打开的跳跃的新降落伞。首套将于2022年底交付。SMTCOPS 的目标是为武装部队和国家宪兵队的作战跳伞人员配备全套高性能降落伞设备和配件。与上一代系统相比,新一代系统具有在更高高度起降和在航行中覆盖更长距离的能力,将增强部队的干预能力,特别是在崎岖地形和极端条件下。该合同于 2016 年授予赛峰集团旗下的 Zodiac Aerosafety Systems,最高金额为 8000 万欧元(含增值税)。它涵盖了包括 755 个降落伞在内的系列设备的开发、采购以及相关支持。

1444927.pdf - 科学图书馆
测量员在获取用于采矿应用的精确空间数据时面临的挑战之一是在崎岖地形和难以进入或无法进入的区域获取数据的风险。随着现代技术的出现,现在可以安全地获取准确的地理空间数据,以便定期进行适当的采矿记录。在矿山测量中使用无人机 (UAV) 进行数据采集是一种快速高效地获取可靠地理空间数据的可行方法。本研究的主要目标是开发一种基于无人机的半自动系统,用于获取估算土方量所需的空间数据。使用 DJI Phantom 4 四轴飞行器采集项目现场的图像数据,并使用 Pix4Dmapper v2.0.1 将图像处理成数字高程模型 (DEM),然后将其导入基于 MATLAB 的土方工程量自动估算系统中。因此,将从自动化系统获得的体积与直接从 Pix4Dmapper 软件获得的体积进行比较,其中指定等高线间隔为 1,允许误差率为 ± 3% 作为标准误差。虽然在使用 Pix4Dmapper 估算的体积中观察到 ± 1.02% 的误差,但开发的自动化系统在其体积估算中产生的估计精度为 ± 0.81%,这证明在准确性和精度方面对于自动体积估算更为可靠。

简介 步行机器人探索埃里伯斯山
Dante 是一个能够爬上陡坡的系绳步行机器人。1992 年,它由卡内基梅隆大学发明,并被部署到南极洲,用于探索活火山埃里伯斯山。Dante 项目的机器人科学目标是展示真实的探索任务、崎岖地形上的移动、环境生存以及在严酷的南极气候下的自我维持运行。火山科学的目标是研究埃里伯斯山内火山口内独特的对流岩浆湖。这次探险展示了移动机器人技术的先进水平和机器人探险者的未来潜力。本文详细介绍了我们的目标,描述了 Dante 机器人,概述了探险过程中发生的事情,并讨论了哪些成功了,哪些失败了。我们要感谢那些为 Dante 和埃里伯斯山探险做出贡献的人。该装置由 K 2 T Inc. 的 Eric Hoffman、Matt Arnold、Tad Dockstader 和 Dimitrios Apostolopoulous 设计和组装。电子设备由 Bryon Smith、Dan Christian 和 Scott Boehmke 制造。Paul Keller、Jay West、Chris Fedor、Bill Ross、Dan Christian 和 Henning Pangels 实施软件,以便 Dante 能够感知、计划、交流和行走。Leslie Thorpe 缝制了防风雨罩。RedZone Robotics Inc. 的 Chuck Whittaker、Rob McWilliams 和 Jim Osborn 管理该项目。Jim Martin、Gary Baun、Brian Albrecht、Jim Frazier、Bob Smith 和卡内基梅隆大学的其他人

智能机器时代的战争 - Monoscope
“杀手机器人”的形象曾经只属于科幻世界。当然,现在情况依然如此,但前提是人们要想到像人类一样的机械装置正在策划征服地球。然而,五角大楼计划的最新武器系统提供了一个不那么拟人化的例子,说明具有“掠夺能力”的机器可能是什么样的:无人驾驶飞机和无人坦克“智能”到能够选择和摧毁自己的目标。虽然现有的机器人武器原型,如PROWLER或BRAVE 3000,还不是真正的自主武器,但这些新武器确实表明,即使人工智能目前还不够先进,无法制造出真正的“杀手机器人”,但当合成智能出现在地球上时,它已经扮演了掠夺者的角色。例如,PROWLER 是一种小型陆地武装车辆,配备了原始形式的“机器视觉”(分析视频帧内容的能力),使其能够在战场上机动并区分敌我。或者至少这是机器人设计者的目标。事实上,PROWLER 仍然难以应对急转弯或在崎岖地形上机动,而且它的敌友识别能力也很差。由于这些原因,它只被部署用于非常简单的任务,例如沿着预定路径巡逻军事设施。我们不知道 PROWLER 是否曾在没有人类监督的情况下向入侵者开火,但令人怀疑的是,按照目前的设计,这种机器人是否被授权自行杀人。更有可能的是,作为视觉传感器的电视摄像机连接到
适用技术: - Glenair
F-35 联合攻击战斗机是一种多用途战斗机,专门针对空对地任务进行了优化,同时还具备空对空辅助能力。它是有史以来设计的最先进的载人战斗机。很有可能,它也将是最后一架。在评估长期总拥有成本以及关键的安全和性能问题(例如安全和防御任务中的人为风险降低)时,很明显,无人系统将在不久的将来接管大多数传统防空功能的主要责任,例如侦察、监视、目标捕获甚至武器部署。军事应用中的无人驾驶车辆在崎岖地形中具有先进的机动性,能够长时间保持在空中,与有人驾驶系统相比具有更好的燃油效率,并且在具有同等功能和性能的情况下总体成本更低。虽然公众的注意力都集中在成功的无人驾驶飞行器 (UAV) 上,例如高空长航时 RQ-4 全球鹰(如图所示),但其他不太知名的系统也在陆地、海洋和太空应用中发挥着同样重要的作用——而不仅仅是军事用途。无人驾驶飞机、潜艇和地面车辆的民用用途包括大气研究和天气预报、火灾监测和有针对性的森林火灾扑灭、农作物监测、炸弹处理、商业捕鱼、偏远地区野生动物普查、城乡安全以及搜索和救援任务。
徘徊者 - Al Wafa International Co.
• 双层加固轮辋车轮。Prowler 的超强双层加固轮辋车轮设计用于在最苛刻的越野和崎岖地形条件下与轮胎配合使用,不会凹陷、弯曲、扭曲或断裂。• 全覆盖防滑板保护。Prowler 的重型底盘防滑板系统可以在单个接触点上支撑整个车辆。这意味着,如果“高居中”,车辆只需要在所有车轮驱动锁定的情况下摇动即可拉出“挂断”点。• 粉末涂层表面处理。所有 Prowler 表面均为工业粉末涂层,而非油漆,经久耐用。• 易于维护和后勤支持。Prowler 平台设计使所有日常服务和维护点都易于维修,无需特殊工具、设备或拆卸。全球经销商均提供主要发动机和传动系统零件和服务。• 完全符合 MIL-STD-882D 系统安全的范围和意图。在 Prowler 平台的整个生命周期中,在潜在任务要求的约束范围内,有效的操作能力和可接受的事故风险评估一直是其设计和发展的关键因素。• 主要附件选项。除了上面提到的所有主要元素(以及随附规格中详细说明的元素)之外,几个重要的平台附件选项包括: o 24 VDC 辅助电源系统。o 扩展范围超重型悬架。o 高性能引擎增强功能。o 动力转向。o 使用相同轮毂凸耳进行车轮到履带的转换。