XiaoMi-AI文件搜索系统
World File Search System左侧


严重事故调查最终报告
两台发动机都处于怠速状态,没有设置停车制动器,飞机缓慢向前移动。此时,牵引机侧的牵引杆端已完全与牵引机断开。然而,尽管锁定装置已解锁,但 NLG 侧的牵引杆端仍然与 NLG 纠缠在一起。由于飞机意外移动,耳机操作员和机翼行走员都必须从被纠缠的牵引杆带离移动的飞机。耳机操作员立即通知机组人员设置停车制动器,但没有任何回应。然后,他断开了 NLG 外部电源控制面板 2 上的无线适配器,并将耳机的耳机插孔直接连接到控制面板。当飞机向前移动时,纠缠的牵引杆与 NLG 分离并摇晃到飞机前左侧。随后,NLG 在机组人员面前与牵引车左侧相撞

CaF2:Tb3+/PDMS 弹性体的接触分离诱导自恢复机械发光
在弹性体上。从左侧喷射的电子主要集中在荧光粉颗粒上,如图 3c-ii 所示。这一结果表明,氟化物荧光粉由于其电负性更强,比 PDMS 聚合物更容易吸引电子。因此,当 CaF 2 -PDMS 界面
操作说明,SOLO PRO 319 RTF 2.4... - RC Today
爬升和下降(“油门/俯仰”):控制模型的爬升和下降。 偏航:模型绕垂直轴的运动;直升机向右或向左旋转。 升降舵:模型绕横轴的运动,向前或向后飞行 滚转:模型绕纵轴的运动,向右或向左横向运动 模式 1:相对于操纵杆运动的控制运动功能分配。在这种情况下,总距/电机速度(油门)和滚转由右侧操纵杆控制;俯仰轴和尾桨由左侧操纵杆控制。 模式 2:相对于操纵杆运动的控制运动功能分配。在这种情况下,总距/电机速度(油门)和尾桨由左侧操纵杆控制;俯仰轴和滚转由右侧操纵杆控制。 双速率:可切换控制运动的行程减少。 绑定:在发射器和接收器之间建立无线电链路。

70-1 洛里昂 lann-bihoue lfrh 星 rwy07
RWY 07:爬升 RM 073° 至 1200(1041),然后直接爬升至航路安全高度。 RWY 25:爬升 RM 253° 至 1200(1041),然后直接爬升至航路安全高度。 RWY 02:以 4.1% (1) 的速度爬升 RM 017° 至 400 (241),然后爬升至 1200 (1041),然后直接爬升至航路安全高度。 (1) 理论上升坡度,确定障碍:距离 DER 870 米、轴线左侧 285 米处的 278 英尺教堂。该斜坡忽略了距离 DER 41 米、轴线左侧 160 米处的 235 英尺树林。 RWY 20:爬升 RM 197° 至 1200(1041),然后直接航线上升至航路安全高度。观察:AD 限制使用。参见特别说明。 * 作战任务:
●我们的结果表明IPS是可推广的多...
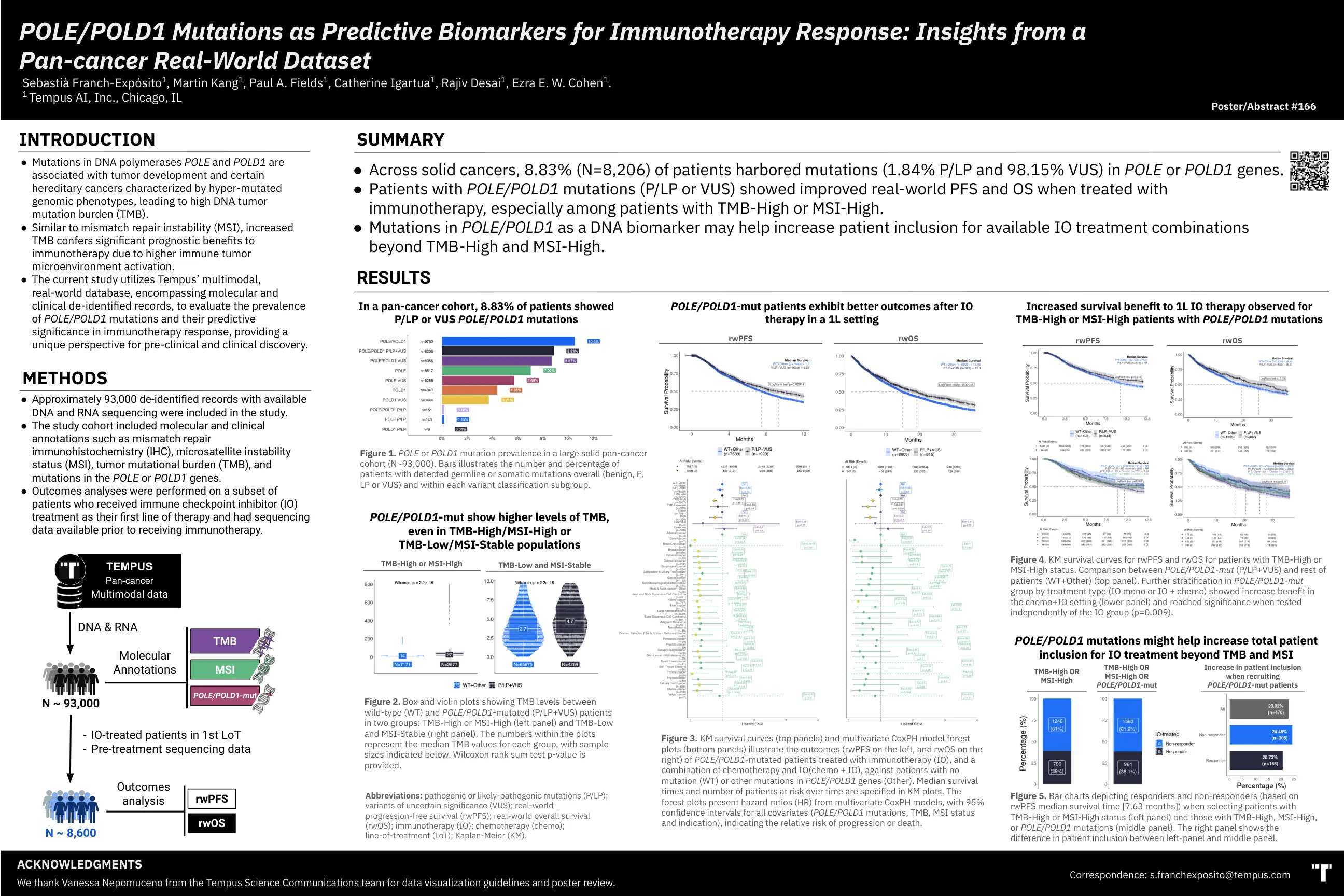
图3。km存活曲线(顶部面板)和多元Coxph森林图(底部面板)说明了POL/POLD 1的左侧的RWPF(左侧RWPF,右侧RWOS)的结果(RWOS),用免疫疗法(IO)治疗的患者(IO)以及与化学疗法和IO + IO + IO + IO + IO + IO + IO(IO)组合的结局(左侧),并与IO + IO + IO(IO)组合进行了突变(基因(其他)。在KM图中指定了随着时间的流逝的中位生存时间和处于危险中的患者人数。森林图具有多元COXPH模型的危险比(HR),所有协变量(POL/POLD1突变,TMB,MSI状态和指示)的置信间隔为95%,表明相对的进展或死亡风险。

操作说明 - Rapid Electronics
专业术语解释: 电机速度(“油门”):控制模型的爬升和下降。偏航:模型绕垂直轴的运动;直升机向右或向左旋转。俯仰轴:模型绕横轴的运动,向前或向后飞行 滚转:模型绕纵轴的运动,向右或向左横向运动 模式 1:相对于操纵杆的控制运动功能分配。在这种情况下,电机速度(油门)和滚转由右侧操纵杆控制;俯仰轴和尾桨由左侧操纵杆控制。模式 2:相对于操纵杆的控制运动功能分配。在这种情况下,电机速度(油门)和尾桨由左侧操纵杆控制;俯仰轴和滚转由右侧操纵杆控制。双速率:可切换行程减少以控制运动。绑定:在发射器和接收器之间创建无线电链路。
严重事故调查最终报告
两台发动机均处于怠速状态,且未设置停车制动器,飞机缓慢向前移动。此时,牵引机侧的牵引杆端已完全与牵引机断开。然而,尽管锁定装置已解锁,但 NLG 侧的牵引杆端仍与 NLG 纠缠在一起。由于飞机意外移动,耳机操作员和机翼行走员都必须从被纠缠的牵引杆带离移动的飞机。耳机操作员立即通知机组设置停车制动器,但没有任何回应。然后,他断开了 NLG 外部电源控制面板 2 上的无线适配器,并将耳机的耳机插孔直接连接到控制面板。在飞机向前移动时,纠缠的牵引杆与 NLG 分离并向飞机前侧左侧摆动。随后,NLG 在机组人员之前与牵引机左侧相撞

LFHY - 蒙特贝格尼工厂 - DIRCAM
出发航班 22.1 IFR 离场建议说明 22.1.1 RWY 08:爬升 MAG 081° 至 1400(490),然后直接航线爬升至航路安全高度。 RWY 08:爬升 RM 081° 至 1400(490),然后直接航线爬升至航路安全高度。跑道 26:以 3.6% 的速度爬升至 MAG 261°,直至 1300(410)(1),然后直接爬升至航路安全高度。 RWY 26:以 3.6% 的速度爬升 RM 261° 至 1300(410)(1),然后直接爬升至航路安全高度。 (1):轴线左侧 DER 附近 1200 米处的森林 ALT 1013 英尺所需的爬升坡度。 (1):位于轴线左侧 DER 1200 米处,海拔 1013 英尺的森林决定的坡度。