XiaoMi-AI文件搜索系统
World File Search System帧速率
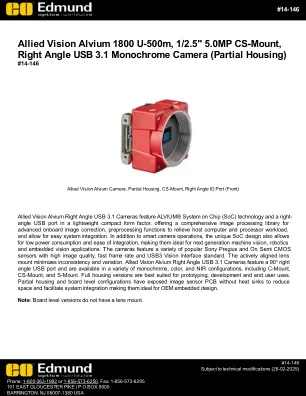
联合视觉Alvium 1800 U-500M,1/2.5“ 5.0MP CS-Mount ...
相关视觉alvium直角USB 3.1相机在芯片(SOC)技术上具有ALVIUM®系统和轻巧紧凑的外形型中的右角USB端口,为高级图像校正,预处理功能提供了全面的图像处理库,以减轻主机和处理器的工作负载以及易于系统集成。除了智能摄像机操作外,独特的SOC设计还允许低功耗和易于集成,使其非常适合下一代机器视觉,机器人和嵌入式视觉应用。相机具有各种流行的索尼Pregius和具有高图像质量,快速帧速率和USB3视觉接口标准的半CMOS传感器。主动排列的镜头安装可最大程度地减少不一致和变化。联合视觉alvium直角USB 3.1相机具有90°直角USB端口,并提供各种单色,颜色和NIR配置,包括C-Mount,CS-Mount和S-Mount。完整的住房版本最适合原型,开发和最终用户用途。部分外壳和板级配置具有裸露的图像传感器PCB,而无需散热器,以减少空间并促进系统集成,使其非常适合OEM嵌入式设计。
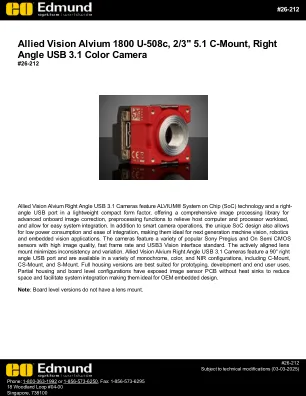
联合视觉Alvium 1800 U-508C,2/3“ 5.1 C-Mount,直角USB 3.1彩色摄像头#26-212
相关视觉alvium直角USB 3.1相机在芯片(SOC)技术上具有ALVIUM®系统和轻巧紧凑的外形型中的右角USB端口,为高级图像校正,预处理功能提供了全面的图像处理库,以减轻主机和处理器的工作负载以及易于系统集成。除了智能摄像机操作外,独特的SOC设计还允许低功耗和易于集成,使其非常适合下一代机器视觉,机器人和嵌入式视觉应用。相机具有各种流行的索尼Pregius和具有高图像质量,快速帧速率和USB3视觉接口标准的半CMOS传感器。主动排列的镜头安装可最大程度地减少不一致和变化。联合视觉alvium直角USB 3.1相机具有90°直角USB端口,并提供各种单色,颜色和NIR配置,包括C-Mount,CS-Mount和S-Mount。完整的住房版本最适合原型,开发和最终用户用途。部分外壳和板级配置具有裸露的图像传感器PCB,而无需散热器,以减少空间并促进系统集成,使其非常适合OEM嵌入式设计。

对飞行仪表和……的安全至关重要的可视化
8 ORCID:0000-0001-6460-7539,vlgal@gin.keldysh.ru 摘要 本文专门介绍了民用飞机驾驶舱的飞行员显示可视化系统。讨论了现代飞行员显示的不同内容。考虑了航空电子设备可视化系统开发的特殊性。民航系统中使用的所有软件都是安全关键的,必须符合国际安全标准。这对所使用的硬件和软件开发过程都提出了额外的要求。飞行员显示可视化系统的核心是 OpenGL 安全关键 (SC) 库。本文介绍了我们阐述的软件和硬件 OpenGL SC 实现。我们描述了通过针对航空应用的具体情况优化 OpenGL SC 代码、使用多核处理器以及最后通过开发利用 GPU 硬件加速的库来提高渲染速度的方面。本文报告了针对实际航空应用测得的渲染速度。只有相对简单的应用程序才能在不使用 GPU 的情况下以可接受的帧速率进行渲染。此外,还讨论了可视化系统认证的进一步发展和可能性。精心设计的可视化软件旨在与俄罗斯实时操作系统 JetOS 一起使用。

基于深度学习和机器视觉技术的增材制造过程的实时缺陷检测策略
摘要:如今,添加剂制造(AM)可以提供高价值的最终用途产品,而不是单个组件。这种进化需要整合多个工艺过程来实施多物质处理,更复杂的结构以及最终用户功能的实现。从这种高级AM技术中受益的一个重要产品类别是3D微电子。然而,整个制造程序的复杂性以及3D微电源产品的各种微观结构显着增强了由于制造缺陷而导致的产品故障的风险。为了应对这一挑战,这项工作介绍了基于深度学习和机器视觉的缺陷检测技术,以实时监视AM制造过程。我们提出了一种增强的Yolov8算法来训练能够识别和评估缺陷图像的缺陷检测模型。为了评估我们方法的可行性,我们将挤出3D打印过程作为应用程序对象,并为数据集量身定制,其中包括四个典型缺陷类别的总计3550张图像。测试结果表明,改进的Yolov8模型以每秒71.9帧的帧速率达到了令人印象深刻的平均平均精度(MAP50)为91.7%。

大型风洞的定量可视化工具...
用于流动可视化的粒子由两个摄像机记录,从而整个测量体积被连续照亮。将摄像机的照明时间设置为最大可能值(约 1/帧速率),从而生成一系列图像,其中移动粒子创建复合段的连续路径。利用来自两个摄像机的粒子轨迹,重建三维粒子轨迹。为了改善弱对比度,从当前图像中减去参考图像,然后对图像进行滤波以抑制噪声,并用阈值算子进行分割。路径段是根据路径连续的事实来识别的,即每个后续段必须准确地位于前一个图像中同一段结束的位置。提取已识别线段的端点,并针对镜头和 CCD 芯片造成的失真校正线段的边缘像素坐标。一旦找不到所讨论路径的新段,就用三次样条函数来近似路径的中心线。根据应用于端点的极线条件确定两个摄像机的相应路径。找到两条对应路径后,在三维空间中逐点重建粒子轨迹。使用三维三次样条函数描述粒子轨迹。根据片段长度和曝光时间可以计算出粒子速度。为了获取有关粒子轨迹形状的信息,附加
FLIR Tau2 产品规格
3.1.2.3 添加了关于模拟交错的注释 3.1.2.4 添加了其他数字输出选项 3.1.2.6 删除了缩放增量/减量离散选项并添加了 (4) 个新的离散选项 3.1.2.7 60Hz/50Hz 模式下可用的外部同步 3.2.2 包含 640、60Hz 帧速率 3.3.1.1 添加了关于符号的飞溅依赖性的注释 3.3.2.1 添加了可变 FFC 帧号功能 3.3.2.2 添加了无快门增益模式切换功能 3.3.2.5 更新了 DDE 的图像和注释 3.3.2.6 添加了新的平台均衡功能 ACE、SSO 和尾部抑制 3.3.2.6.1 更新了当前版本和过去版本的 IIR 滤波器参数含义,并重命名为 AGC 滤波器以与 SW IDD 对齐 3.3.2.6.2 添加了新的基于信息的算法描述 3.3.2.6.2 更新了尾部拒绝的线性直方图 3.3.2.7.1 YCbYCr 输出添加 3.3.2.8 添加了用户可在模拟和数字中选择的符号系统 3.3.2.10/11 删除了对配置的校准依赖 3.3.2.12 添加了 SSN 功能 3.3.3.1 添加了饱和阈值的等温线 3.3.4.5 添加了状态标志部分 3.5.1 更新了可靠性规范
FLIR Tau2 产品规格
3.1.2.3 添加了关于模拟交错的注释 3.1.2.4 添加了其他数字输出选项 3.1.2.6 删除了缩放增量/减量离散选项并添加了 (4) 个新的离散选项 3.1.2.7 60Hz/50Hz 模式下可用的外部同步 3.2.2 包含 640、60Hz 帧速率 3.3.1.1 添加了关于符号的飞溅依赖性的注释 3.3.2.1 添加了可变 FFC 帧号功能 3.3.2.2 添加了无快门增益模式切换功能 3.3.2.5 更新了 DDE 的图像和注释 3.3.2.6 添加了新的平台均衡功能 ACE、SSO 和尾部抑制 3.3.2.6.1 更新了当前版本和过去版本的 IIR 滤波器参数含义,并重命名为 AGC 滤波器以与 SW IDD 对齐 3.3.2.6.2 添加了新的基于信息的算法描述 3.3.2.6.2 更新了尾部拒绝的线性直方图 3.3.2.7.1 YCbYCr 输出添加 3.3.2.8 添加了用户可在模拟和数字中选择的符号系统 3.3.2.10/11 删除了对配置的校准依赖 3.3.2.12 添加了 SSN 功能 3.3.3.1 添加了饱和阈值的等温线 3.3.4.5 添加了状态标志部分 3.5.1 更新了可靠性规范

联合视觉Alvium 1800 U-500C,1/2.5“ 5.0MP,USB 3.1彩色相机(板级)#14-151
相关视觉ALVIUM USB 3.1摄像机具有芯片(SOC)技术的ALVIUM®系统轻巧的紧凑型外形,提供了一个全面的图像处理库,可用于高级板上图像校正和预处理功能,以减轻主机计算机和处理器的工作负载。除了智能摄像机操作外,独特的SOC设计还允许低功耗和易于集成,使其非常适合下一代机器视觉,机器人和嵌入式视觉应用。相机具有各种流行的索尼Pregius和具有高图像质量,快速帧速率和USB3视觉接口标准的半CMOS传感器。主动排列的镜头安装可最大程度地减少不一致和变化。联合视觉Alvium USB 3.1摄像机在后面板上具有USB端口,并提供各种单色,颜色和NIR配置,包括C-Mount,CS-Mount和S-Mount。完整的住房版本最适合原型,开发和最终用户用途。部分外壳和板级配置具有裸露的图像传感器PCB,而无需散热器,以减少空间并促进系统集成,使其非常适合OEM嵌入式设计。
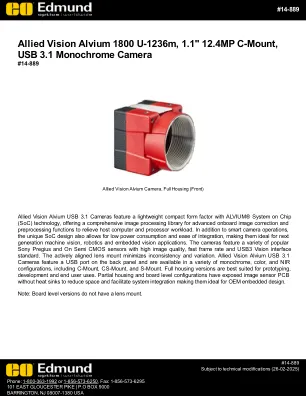
联合视觉Alvium 1800 U-1236M,1.1“ 12.4MP C-Mount,USB 3.1单色相机#14-889
相关视觉ALVIUM USB 3.1摄像机具有芯片(SOC)技术的ALVIUM®系统轻巧的紧凑型外形,提供了一个全面的图像处理库,可用于高级板上图像校正和预处理功能,以减轻主机计算机和处理器的工作负载。除了智能摄像机操作外,独特的SOC设计还允许低功耗和易于集成,使其非常适合下一代机器视觉,机器人和嵌入式视觉应用。相机具有各种流行的索尼Pregius和具有高图像质量,快速帧速率和USB3视觉接口标准的半CMOS传感器。主动排列的镜头安装可最大程度地减少不一致和变化。联合视觉Alvium USB 3.1摄像机在后面板上具有USB端口,并提供各种单色,颜色和NIR配置,包括C-Mount,CS-Mount和S-Mount。完整的住房版本最适合原型,开发和最终用户用途。部分外壳和板级配置具有裸露的图像传感器PCB,而无需散热器,以减少空间并促进系统集成,使其非常适合OEM嵌入式设计。

远程塔环境中较低帧率的影响
摘要 — 在航空领域,“远程塔台”是一个当前快速发展的概念,为机场提供经济高效的空中交通服务 (ATS)。其基本原理是依靠光学摄像机传感器,其视频图像从机场中继到位于任何地方的 ATS 设施,并显示在视频全景图上,以提供独立于塔台窗外视野的 ATS。带宽通常有限且昂贵,但在这种经济高效的系统中起着至关重要的作用。降低中继视频流的帧速率 (FR,以 fps 表示) 是节省带宽的一个参数,但会以视频质量为代价。因此,本文评估了在不影响操作性能和人为因素问题的情况下可以减少多少 FR。在我们的研究中,七名空中交通管制员观看了由德国航空航天中心 (DLR e.V.) 布伦瑞克-沃尔夫斯堡机场 (BWE) 的远程塔台现场测试平台录制的真实空中交通视频。在被动阴影模式下,受试者在四种不同的 FR 条件下(2 fps、5 fps、10 fps 和 15 fps)执行 ATS 相关任务,以客观衡量其视觉检测性能并主观评估其当前生理状态以及感知的视频质量和系统可操作性。研究结果表明,通过降低 FR,视觉检测性能和生理状态均不会受到影响。只有感知的视频质量和感知的系统可操作性会因降低 FR 而下降