XiaoMi-AI文件搜索系统
World File Search System平面视图
自动识别建筑物中的变形和...
图5.2 Faro Company(A)LIDAR 360O的商业地面激光扫描仪(300O视野)视会(b)LIDAR工作原理(c)从LIDAR捕获的3D数据的平面视图。(D)低分辨率和高分辨率对周围环境捕获的图像的影响(礼貌:Faro Company)。
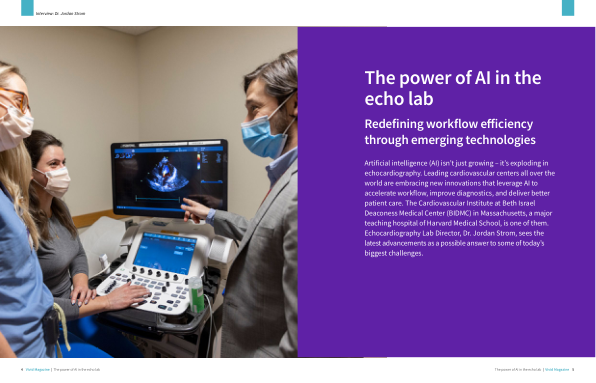
人工智能在超声心动图实验室中的强大功能
在我们的实验室,我们从心尖视图的三平面图像开始成像。三平面图像本质上是三个不同角度的同步图像,在同一心跳中提供四腔、二腔和三腔视图。这使我们能够可视化和访问心壁的各个方面,检测壁运动异常,并使用 AFI 包测量整体纵向应变。它还通过 AI 视图识别和自动轮廓绘制提供双平面射血分数,并且速度很快。除此之外,三平面视图还使我们能够评估图像质量并立即确定我们是否需要回声对比,并可以提前开始规划。当我告诉人们这一点时,他们会说,“你为什么从那个 [视图] 开始?” 我说,“那么,我们为什么要从胸骨旁长轴开始?”

在怀疑的经甲状腺素蛋白心脏淀粉样变性(ATTR-CA)中,用骨刺激器解释和报告心脏闪烁显像
带有骨avid示踪剂的心脏闪烁显像,99mtc-3,3-二磷酸-1,2-丙诺二羧酸(TC-99M DPD),99mtc-磷酸(TC-99M PYP)和99mtc-Hydroxymentymentementecymtc-磷酸盐(TC-99M PYP)和99mtc-Hydroxymentymethyle diphosphonate(TCC-hosphonate)(TCCHosphonate999) TC-99M HDP),是基于成像的诊断途径的基石,用于准确,无创的脑甲状腺素蛋白心脏淀粉样变性(ATTR-CA)。虽然先前强调的成像协议强调了平面成像和在前平面视图上的心脏到互联肺(H/CL)比以确认性诊断的比率,但1个最新建议识别出关于平面成像的发现,从而导致图像解释不正确,并在SPECT/SPECT/CT上突出显示出诊断性的图像评估。2,3层析成像允许直接可视化心肌中的示踪剂吸收并避免解释。
预测大规模分布式工作记忆活动...
图 1:多区域小鼠皮质模型的解剖基础。(A)。小鼠皮质区域的平面视图。图片改编自 (Harris et al. 2019)。(B)。每个大脑区域的标准化 PV 细胞分数,在小鼠大脑的 3d 表面上可视化。突出显示了五个区域:VISp、初级体感区、桶状场 (SSp-bfd)、初级运动 (MOp)、MOs 和 PL。(C)。每个皮质区域的 PV 细胞分数,按顺序排列。每个区域都属于五个模块之一,以彩色显示。(Harris et al. 2019)。(D)。3d 大脑表面上每个区域的层次位置。五个区域如图 (B) 所示突出显示,颜色代表层次位置。(E)。每个皮质区域的层次位置。对层级位置进行归一化,将VISp的层级位置设为0。如C)所示,颜色代表区域所属的模块。(F)。PV细胞分数与层级之间的相关性(皮尔逊相关系数r = − 0.35,p < 0.05)。

河口底栖测绘数据的空间分析与可视化工具与技术
图 1。用于在 GIS 中表示底栖栖息地特征的矢量数据模型示例图 2。用于在 GIS 中表示底栖栖息地特征的栅格数据模型示例图 3。栖息地规模、传感器分辨率、分析/可视化技术与底栖栖息地测绘资金之间的关系图 4。传感器的相对尺度和底栖栖息地测绘分析图 5。多波束测深数据显示数据分辨率对在不同空间尺度上可视化底栖栖息地的影响图 6。底栖栖息地数据的数据显示、数据分析和数据集成之间的差异示例图 7。显示了显示和分析测深数据的不同技术的图表。转换为栅格 (b) 的水深点数据 (a) 可以查询以获取其他数据,例如深度轮廓 (c) 图 8。图示说明从侧扫声纳马赛克中划定地质基质,随后使用更高分辨率的 SPI 样本划定子栖息地 图 9。侧扫和多波束声纳数据的比较显示数据连续性的差异 图 10。Kostylev 等人的底栖栖息地测绘示例。2001 图 11。不同点插值技术的比较 图 12。使用平面视图摄影进行鳗草监测的示例数据收集和分析方法。