XiaoMi-AI文件搜索系统
World File Search System手指

鼠标处理和技术。 ...
捡起成年老鼠时,将它们轻轻但牢固地抓住在尾巴的底部或中心。不要用尾巴的尖端捡起它们。将动物放在钢笼顶部或盖子等表面上(图5A)。最好的表面不是光滑的或光滑的,因为如果老鼠的地位牢固,则表现得更加平静。保持尾巴,将另一只手的拇指和第一根手指放在下背部。轻轻向下并向前,直到到达脖子后部的额外皮肤,触摸耳朵。(图5b)。将松散的皮肤牢固地捏住(图5C),抬起鼠标,将尾巴拉到手腕上,并用戒指/小指固定尾巴(图5D)。如图所示,可以用最后两个手指握住尾巴(图5E)。您的抓地力应该足够坚硬,以防止鼠标挣扎,但足够温和,可以舒适地呼吸。

生物膜和隐形眼镜问题和解决方案
全球超过15万人使用的隐形眼镜使用了超过15万人。在澳大利亚,约有13%的人口穿着隐形眼镜(约340万人)。隐形眼镜最常用于纠正近视(远见),但可用于纠正远视(长距离视力)和其他形式的屈光误差。最常用的镜头是软镜片,占全球所有镜头的75%。1这些软透镜每天佩戴48%的佩戴者(镜头在一天结束时被丢弃,第二天丢弃了新的镜头)或49%的佩戴者每天穿着(每天都在磨损,镜片在每天不磨损时被清洁和消毒,每天不磨损和重新磨损2或4周,持续2或4周。每天磨损的1个软镜,每晚使用多用途消毒溶液在隐形眼镜病例中消毒,其中88%的佩戴者通常使用过氧化氢。将镜头从眼睛上移开(用清洁的最近洗过手指和干燥的手指),然后将其添加到隐形眼镜盒中进行消毒后,制造商建议在透镜上添加一些新鲜的陶瓷效果溶液,并用另一只手的手指摩擦透镜,以帮助另一方面擦除任何debris。然后应用新鲜的消毒溶液冲洗镜头,并使用新鲜的消毒溶液添加到外壳中。所有制造商都有建议的最小消毒时间,通常在4到6小时之间。
操作手册
• 请勿将手指或异物插入进气口或出气口。 • 将头发、宽松的衣服、手指和身体的所有部位远离开口和运动部件。 • 请勿阻塞进气口和出气口。切勿将小物件插入进气口/出气口。 • 如果电源线或插头损坏,或者与墙上插座的连接松动,请勿使用空气净化器。 • 拔下电源插头时,请务必握住插头,切勿拉扯电线。 • 请勿在热物体(如炉灶)附近或上面使用本机,或可能暴露于蒸汽的地方。 • 移动或维护时,请停止本机并拔下电源插头。移动设备时,请务必握住设备侧面的手柄。 • 为避免引起火灾和/或电击,请勿尝试拆卸本机 - 只有经过认证的技术人员才可以这样做。 • 请勿清洗或重复使用 HEPA-Rx 过滤器和活性炭过滤器。
气管插管袖带压力测量技术
目的 本研究旨在定性评估和比较塔马利教学医院产科接受剖宫产插管全身麻醉的患者中涉及套囊充气的一些技术及其相应的压力估计以及相关并发症。结果 插管后,使用手指触诊测压球囊、预定量的空气和压力计测量气管插管套囊压力。拔除气管插管 24 小时后确定相关副作用。分析包括 384 名患者的数据。患者测量的袖带压力在标准压力计组为 < 20 -30 cmH 2 O,预定量空气组为 20 至 50 cmH 2 O,手指触诊组为 < 20 至 < 50 cmH 2 O。2.3% 的患者记录到副作用
疾病,疾病和伤害腕管综合症
例如,弯曲腕部或移动手指将肌肉和肌腱带入行动。当一个人弯曲手指时,肌腱移动约2英寸。手的肌腱被包裹在鞘或肌腱滑动的袖子中。鞘的内壁包含产生湿润的液体以润滑肌腱的细胞。润滑对于肌腱的正常和平滑功能至关重要。随着手的重复或过度运动,润滑系统可能会出现故障。它可能不会产生足够的液体,或者可能产生润滑质量较差的液体。润滑系统的故障会在肌腱及其鞘之间产生摩擦,从而在肌腱区域引起炎症和肿胀。反过来,肿胀挤压了手腕或腕管中的中位神经。炎症的重复发作会导致纤维组织形成。纤维组织使肌腱鞘和后肌腱运动增厚。

EMG信号分类和使用机器学习和
在本文中,使用支持向量机(SVM)设计了一个分类器来对肌电图(EMG)信号进行分类。鉴于EMG信号,基于SVM的分类器旨在将十个单独的手指运动命令分类为预定义的运动之一。在分类之前,将EMG数据用DWT(例如平均绝对值(MAV),均方根(RMS)和SD提取,并将每个窗口提取并组合到功能集。提取的特征用作分类系统的输入。线性SVM(单位方法)用于EMG信号的多类分类。DWT大小。还报告了确保手指运动之间最大歧视的最佳功能集。验证表明,支持向量机可以正确分类EMG信号,更高的分类精度为91.7%,适用于为建议的方法设计。

AI虚拟鼠标。
这项研究将提出一种无需任何电子设备即可控制光标位置的方法。而诸如单击和拖动等操作将使用各种手势来执行。作为输入设备,拟议的系统只需要一个网络摄像头。该系统将需要使用 OpenCV 和 Python 以及其他工具。相机的输出将显示在系统的屏幕上,以便用户可以进一步校准它。NumPy 和鼠标是用于创建此系统的 Python 要求 - 在项目第一阶段,实现和探索是在虚拟鼠标上完成的。它还包括手部跟踪,跟踪手掌并显示帧速率,手指计数,计数手指并使用手部跟踪模块作为其基础。之后,手势音量控制通过提取某些手部特征来控制音量。这些项目旨在提高生产力。我们使用 Open-Cv、Media-Pipe 和 Python 等技术。Media-Pipe 由 Google 开发。它非常高效,有助于为 AI 项目提供快速解决方案。
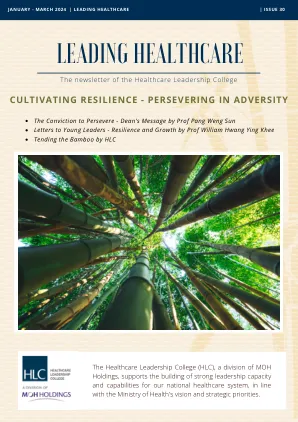
第30期 - 医疗保健领导学院
荷兰大约四分之一的土地已从海洋中回收,位于海平面以下。堤防被建造为防止洪水的障碍。有一个故事,讲述一个男孩在荷兰经过,他经过一辆堤防,并注意到水从一个小孔中漏出。他知道,如果一个人留下,洞将会变大,最终堤防会破裂,海水会倒入并淹没村庄。勇敢地,他伸出手指阻塞泄漏,希望有人会提醒村庄。,但是已经深夜了,没人来。他的家人开始寻找他,并最终发现他靠在堤防上,精疲力尽,手指仍然塞满了洞。这个故事可能不是真的(这归因于美国作家玛丽·枫树道奇(Mary Maples Dodge),她创作了这个故事,作为她在1865年写的小说的一部分),但肯定强调了韧性和毅力的主题。出于旅游目的,在荷兰竖立了这个男孩的雕像。

muxhand:使用时间划分的多重电动机
摘要 - 机器人灵巧的手负责抓握和灵巧的操纵。电动机的数量直接影响了此类系统的敏捷性和成本。在本文中,我们提出了Muxhand,这是一种使用时间分割多路复用电动机(TDMM)机制的机器人手。该系统允许仅4电动机独立控制9条电缆,从而显着降低了成本,同时保持高敏度。为了提高抓握和操纵任务期间的稳定性和平滑度,我们将磁接头整合到了三个3D打印的手指中。这些关节具有出色的影响力和自我测量能力。我们进行了一系列实验,以评估Muxhand的抓握和操纵性能。结果表明,TDMM机制可以精确控制连接到手指接头的每个电缆,从而实现强大的抓握和灵活的操作。此外,指尖载荷能力达到1.0 kg,磁接头有效地吸收了冲击和校正未对准而不会损坏。
