XiaoMi-AI文件搜索系统
World File Search System手术机器人
手术技术手册
[1] Michael DR, MD,《无骨水泥髋臼杯的演变回顾》,ORTHOSuperSite,2008 年 12 月 1 日。[2] Medacta 文件中的数据。[3] YK Lee、KC Kim、WL Jo、YC Ha、J. Parvizi、KH Koo。髋臼金属壳内锥角对陶瓷内衬的错位力和分离力的影响。《关节成形术杂志》2017 年 4 月;32(4):1360-1362。[4] YK Lee、JY Lim、YC Ha、TY Kim、WH Jung、KH Koo。预防 Delta 陶瓷对陶瓷全髋关节置换术后陶瓷内衬断裂。《骨科与创伤外科档案》2021 年 7 月;141(7):1155-1162。 [5] L. Dall'Ava、H. Hothi、J. Henckel、A. Di Laura、P. Shearing、A. Hart。当前 3D 打印髋臼钛植入物的比较分析。3D 打印医学 2019;5:15。[6] P. Robotti、A. Sabbioni、L. Glass、B. George,《热等离子喷涂大孔钛涂层》,ITSC 2013,国际热喷涂会议,2013 年 5 月 13 日至 15 日,韩国釜山。[7] JE Biemond 等人,《3 维电子束产生的植入物表面骨长入潜力的体内评估以及酸蚀和羟基磷灰石涂层等附加处理的效果》,J. Biomat。 Appl,2011 年 1 月 27 日在线发表,0885328210391495。[8] R. Ferro de Godoy 等人,通过创新粉末冶金方法制造的钛大孔结构的体内评估。eCM XIII 论文集:骨固定、修复和再生,2012 年 6 月 24-26 日,瑞士达沃斯。[9] A. Goodship 等人,通过放电等离子烧结产生的工程表面拓扑结构的体内生长潜力评估,第 9 届世界生物材料大会论文集,2012 年 6 月 1-5 日,中国成都。

开颅手术
开颅手术是暂时打开部分头骨以露出大脑以便进行手术的程序。过去 20 年的进步使开颅手术更安全、更简单和更成功。神经外科医生现在可以在曾经认为无法触及的大脑区域进行手术。开颅手术是许多不同疾病外科治疗的一部分,包括:• 大脑内部或周围膜的生长物。• 血栓压迫大脑,通常是由于急性头部受伤造成的。• 动脉薄弱部位凸起时会形成动脉瘤。在某些患者中,动脉瘤可能会扩大,从而增加了其破裂并导致脑大出血的风险。许多动脉瘤可以通过腿部手术治疗。在某些情况下,神经外科医生可能会在动脉瘤附近放置钛夹以将其与正常动脉封住。未经治疗的动脉瘤可能会破裂,导致危及生命的脑出血。 • 需要引流的感染或脓肿。 • 癫痫,当药物无法控制时,有时可以通过切除引起癫痫发作的脑部部位来治疗。 • 某些疼痛综合征,可通过减压被动脉压迫的神经来治疗 • 因炎症引起的脑肿胀 • 因创伤引起的颅骨骨折 • 异物穿透大脑。 开颅手术的宽度范围很广,从几毫米(锁孔或钻孔开颅手术)到几厘米不等,具体取决于问题和所需的治疗。 颅底手术和开颅手术:大脑底部位于颅底上。要切除某些类型的肿瘤,外科医生必须进入颅底并进行开颅手术。尽管颅底手术很复杂并且通常需要计算机,但近年来取得了很大进展,风险也更容易接受。
手术 @墨尔本
1。Sun Yat-Sen University 2。 克利夫兰诊所基金会3。 杜克大学4。 多伦多大学5。 新加坡国立大学6。 南方医科大学7。 新加坡国家眼中心8。 伦敦大学学院9。 南中国技术大学10。 广东省人民医院11。 维也纳医科大学12。 剑桥大学13。 华盛顿大学14。 休斯顿卫理公会15。 Moorfields眼医院NHS基金会信托16。 牛津大学17。 案例西部储备大学18。 伯恩大学19。 康奈尔大学20。 Guy's和St Thomas'NHS基金会信托21。 上海若o汤大学22。 McMaster University 23。 哥伦比亚大学24。 香港中国大学25. 哥本哈根大学26。 约翰·霍普金斯大学27。 纪念Sloan-Kettering癌症中心28。 加利福尼亚大学洛杉矶分校29。 迈阿密大学30。 纽约长老会医院31。 Zhejiang UniversitySun Yat-Sen University 2。克利夫兰诊所基金会3。杜克大学4。多伦多大学5。新加坡国立大学6。南方医科大学7。新加坡国家眼中心8。伦敦大学学院9。南中国技术大学10。 广东省人民医院11。 维也纳医科大学12。 剑桥大学13。 华盛顿大学14。 休斯顿卫理公会15。 Moorfields眼医院NHS基金会信托16。 牛津大学17。 案例西部储备大学18。 伯恩大学19。 康奈尔大学20。 Guy's和St Thomas'NHS基金会信托21。 上海若o汤大学22。 McMaster University 23。 哥伦比亚大学24。 香港中国大学25. 哥本哈根大学26。 约翰·霍普金斯大学27。 纪念Sloan-Kettering癌症中心28。 加利福尼亚大学洛杉矶分校29。 迈阿密大学30。 纽约长老会医院31。 Zhejiang University南中国技术大学10。广东省人民医院11。维也纳医科大学12。剑桥大学13。华盛顿大学14。休斯顿卫理公会15。Moorfields眼医院NHS基金会信托16。牛津大学17。案例西部储备大学18。伯恩大学19。康奈尔大学20。Guy's和St Thomas'NHS基金会信托21。上海若o汤大学22。McMaster University 23。 哥伦比亚大学24。 香港中国大学25. 哥本哈根大学26。 约翰·霍普金斯大学27。 纪念Sloan-Kettering癌症中心28。 加利福尼亚大学洛杉矶分校29。 迈阿密大学30。 纽约长老会医院31。 Zhejiang UniversityMcMaster University 23。哥伦比亚大学24。香港中国大学25.哥本哈根大学26。约翰·霍普金斯大学27。纪念Sloan-Kettering癌症中心28。加利福尼亚大学洛杉矶分校29。迈阿密大学30。纽约长老会医院31。Zhejiang University


使用机器人解决方案来解决复杂的胸外手术操作:叙事评论
来自国家癌症数据库(NCDB)(25)。 病例系列包括良性的原发性胸壁肿瘤和入侵胸壁的局部晚期肺癌。 作者报告了所有患者的出色结果,重点是机器人手术在恢复位于困难的解剖区域中的肿瘤中的有用性,一个例子是肩cap骨或胸部的顶点。 在本报告中,没有公开的转换,中位住院时间为3天,没有30天的再入院或90天死亡率。 在2012年至2017年的NCDB中,在美国偶尔使用了机器人方法。 从NCDB开始,转化率19%,住院时间中位数为7天,以及4%的30天死亡率,与全国性的胸壁切除死亡率相似。 Verm等。 总结了实施机器人手术以进行胸壁切除的可行性,安全性和出色的结果。来自国家癌症数据库(NCDB)(25)。病例系列包括良性的原发性胸壁肿瘤和入侵胸壁的局部晚期肺癌。作者报告了所有患者的出色结果,重点是机器人手术在恢复位于困难的解剖区域中的肿瘤中的有用性,一个例子是肩cap骨或胸部的顶点。在本报告中,没有公开的转换,中位住院时间为3天,没有30天的再入院或90天死亡率。在2012年至2017年的NCDB中,在美国偶尔使用了机器人方法。从NCDB开始,转化率19%,住院时间中位数为7天,以及4%的30天死亡率,与全国性的胸壁切除死亡率相似。Verm等。总结了实施机器人手术以进行胸壁切除的可行性,安全性和出色的结果。
Belharra诊所配备了DA VinciX®手术机器人的最新一代和专用于
•Bayonne的Belharra诊所(64),RamsaySanté集团的建立,通过收购Da VinciX®手术机器人来增强其技术托盘。•该设备构成了清晰的自镜手术技术的明显改进,并允许减少侵入性干预措施,以减少住院持续时间和患者的术后疼痛。•该机器人目前用于泌尿外科癌症手术(肾脏,前列腺,膀胱)以及复杂的功能性手术,例如器官下降或pyelo-ure-ure-ure-urewnction综合征。到2025年,其使用将扩展到消化,胸腔,妇科和ENT手术。•作为巴斯克地区癌症管理的主要演员,贝哈拉诊所有前列腺课程。这是一条专门的途径,可为该地区的患者提供加速获得首次泌尿外科咨询,前列腺MRI和恰好针对的微型活检的途径。•ExactVU™是前列腺活检期间使用的微型超声靶向工具,允许非常精确的前列腺病变靶向,这要归功于MRI图像融合。•在Movember之际,贝尔哈拉诊所(Belharra Clinic)致力于预防男性癌症,为公众提高了意识。
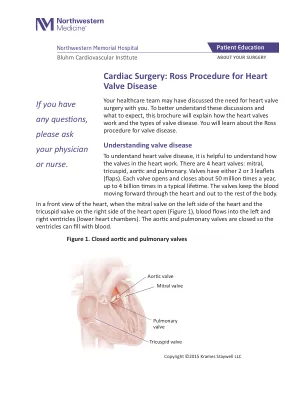
心脏手术:心脏瓣膜疾病的罗斯手术
瓣膜手术风险每次手术都有一些风险。风险量取决于您的年龄和整体健康等因素。风险可能包括出血,感染以及肺或心脏问题。心房颤动(一种不规则的心律)或AFIB是手术后可能发生的心脏问题的一个例子。在某些情况下,您可能需要起搏器或其他程序。在极少数情况下,患者可以中风或肾衰竭。您的外科医生将与您谈论您的个人风险。
小儿先天性心脏手术中的手术死亡率
为了分层与不同手术程序相关的SM的风险,已经创建了几个量表。2002年发表的先天性心脏外科1(RACHS-1)量表的风险调整,根据其技术复杂性和与该程序相关的SM的风险将不同的CHD分为6组[12]。因此,类别1对应于与SM较低风险相关的CHD组,而6类是最高风险[13,14]。RACHS-1量表的特征是易于实施和实用性,也经常用于评估机构的绩效,并将其与同一中心相比,随着时间的流逝[15,16],以及其他国家和国际中心,以及与其他SM率的复杂程度有关,尤其是其他标准量表,尤其是在过去的[17]。
3D打印机软件机器人的垂直尖端轨迹跟踪:启用手术血液吸力自动化
摘要 - 富有的机器人操纵器在微创手术中非常有用,这是由于它们具有高度灵活性的优势,并具有无限的自由度(DOF)。潜在的应用之一是进行吸血,这在手术过程中是不可避免的。为了在吸力方面提高效率,机器人尖端应保持垂直,同时沿工作表面移动。是出于本应用的激励,本文提出了一种新颖的软机器人设计及其控制方案,以正确配置两段软机器人的尖端,同时遵循工作表面上的计划轨迹。旨在减少切口尺寸和感染的可能性,设计和制造了直径为9毫米的电缆驱动机构的3D打印的柔软的操纵器。通过电动插入阶段添加了额外的DOF。使用分段恒定曲率假设对机器人系统进行建模,并采用RGB-D视觉来增强基于运动学的控制器的准确性。通过模拟评估了尖端定位和垂直化的性能,并通过实验进一步验证。结果证实了Ma-nipulator能够在各种速度下遵循不同轨迹的同时保持其尖端垂直。与其他类似的作品相比,我们的结果是在7 mm以内的轨迹跟踪RMSE和6°的最大角度偏差之内令人满意的。流体吸力实验,以证明其自动3D吸力的有效性。这项工作提供了一种新工具,可以支持外科医生进行手术吸血。