XiaoMi-AI文件搜索系统
World File Search System手术机器人

在机器人辅助手术期间的自主标记的超声引导系统
摘要 - 虽然只有有限数量的程序在机器人指导手术期间可用图像指导,但他们仍然要求外科医生手动将所获得的扫描引用到其在组织表面上的预计位置。虽然外科医生可以通过电外科标记器官表面上的边界,但肿瘤周围的精确边缘可能会保持可变,并且在病理分析之前不能保证。本文提出了第一次尝试自主提取和标记肿瘤边界,并在组织表面上指定边缘。它提出了通过惯性测量单元(IMU)传感器融合进行刀具 - 组织相互作用控制的第一个概念,并从电信单元(ESU)的电信号中进行接触检测,不需要力感应。我们使用解剖表面几何形状开发并评估了对超声(US)幻象的方法,比较将肿瘤投射到表面上的不同策略,并评估其在重复试验中的准确性。最后,我们证明了将方法转化为前猪肝的可行性。我们能够达到高于0的真正正率。84和低于0的错误检测率。12与虚拟和前体实验的标记轨迹的每个计算和执行的跟踪参考相比。

在参加手术专业诊所的患者中对机器人手术的知识,态度,意识和未来期望
大多数参与者(58.6%,n = 178)在21至40岁之间,男性是参与者的52%。许多受访者认为机器人没有进行手术。70.7%的受访者没有听说过机器人手术,媒体是最常见的信息来源。内部损害是机器人手术故障的普遍关注点(51.0%,n = 155)。在21至40岁的参与者与机器人手术更偏爱的参与者之间存在显着关系(p = .027)。喜欢机器人手术的受访者与认为机器人手术更安全并且结果更好的参与者有着显着的关系(p <.001)。不喜欢机器人手术的参与者中有13.9%也大大考虑了成本(χ2= 28.93,p <.001,Cramer的V = .22)。67.2%(n = 43)的受访者更喜欢机器人手术,认为这最终可能会取代当前的做法。

用于机器人辅助手术工作量预测的多模态生理信号
在机器人辅助手术期间监测外科医生的工作量可以指导任务需求的分配、调整系统界面和评估机器人系统的可用性。当前测量认知负荷的做法主要依赖于主观且会扰乱手术工作流程的问卷。为了解决这一限制,展示了一个计算框架来预测远程机器人手术期间的用户工作量。该框架利用无线传感器来监测外科医生的认知负荷并预测他们的认知状态。在经过验证的达芬奇技能模拟器上执行手术技能任务的十二名外科医生同时记录了多种生理模式(例如心率变异性、皮肤电和脑电图活动)的连续数据。这些手术任务的难度各不相同,例如,需要不同的视觉处理需求和精细运动控制程度。使用独立成分分析融合收集的多模态生理信号,并将预测结果与真实工作量水平进行比较。结果比较了不同分类器、传感器融合方案和生理模态(即使用单一模态与多种模态进行预测)的性能。结果发现,我们的多传感器方法优于单个信号,并且可以在基本和复杂的手术技能任务中 83.2% 的时间内正确预测认知工作量水平。

探索妇产科机器人手术的演变:过去,现在和未来的观点
机器人手术已成为妇产科和妇科中的一种变革性技术,为各种程序提供了增强的精度和微创技术。本文探讨了妇产科机器人手术的演变,研究了其历史发展,当前的应用和前景。通过对文献和案例研究的全面综述,我们重点介绍了机器人手术的好处,包括减少创伤,改善患者结局和外科医生能力提高。但是,成本,培训要求和监管问题阻碍了广泛采用。持续的技术创新有望提高机器人辅助程序的功效和适用性。医疗保健专业人员,研究人员和行业利益相关者之间的合作对于应对这些挑战并确保最佳患者护理至关重要。通过拥抱机器人手术带来的机会,同时应对相关挑战,从业人员和研究人员可以为这种变革性技术在妇产科和妇科中的持续发展做出贡献。

基于 3D 颅骨重建的机器人立体定位系统可提高手术准确性和速度
我们开发了下一代机器人立体定位平台,用于小动物,结合了三维 (3D) 颅骨轮廓仪子系统和完整的六自由度 (6DOF) 机器人平台,以提高空间精度和手术速度。3D 颅骨轮廓仪基于结构照明,其中视频投影仪将一系列水平和垂直线图案投射到动物颅骨上,并由两个二维 (2D) 常规 CCD 相机捕捉,以基于几何三角测量重建精确的 3D 颅骨表面。使用重建的 3D 颅骨轮廓,可以使用基于 Stewart 设计的 6DOF 机器人平台引导和重新定位颅骨,以精确对准手术工具,以达到特定的大脑目标。使用机械测量技术对系统进行了评估,并使用琼脂脑模型演示了平台的精确瞄准。麻醉的单角沙鼠也用于该系统,通过使用玻璃移液器注射染料来瞄准梯形体 (MNTB) 的内侧核。切除的脑切片荧光成像证实了瞄准脑核的准确性。结果表明,这种新的立体定位系统可以提高神经科学研究中小规模脑部手术的准确性和速度,从而加速神经科学发现并降低实验动物的流失率。

单端口访问(SPA)手术的可插入机器人效应器平台的系统设计
摘要 - 本文介绍了用于单端口访问(SPA)手术的可插入机器人效应器平台(IREP)的新型设计和初步运动分析。可以通过Ø15mm的皮肤切口将IREP机器人部署到体腔中,以执行水疗过程。它由两个类似蛇的连续机器人作为组织操纵的奴隶手术助手,连续机器人的放置的两个平行四边形机制,以及一个可控的立体声视觉模块,具有深度感知和工具跟踪的集成光源。本文介绍了该17多道手术机器人系统的设计注意事项和替代方案,计算和初步模拟。还介绍了使用IREP机器人进行电信操作的整体控制系统层次结构。
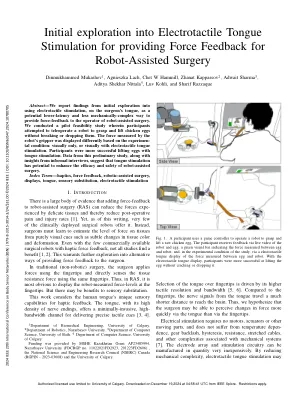
对电动舌刺激的初步探索,以提供机器人辅助手术的力反馈
摘要 - 我们报告了最初探索的结果,即使用电动刺激,在外科医生的舌头上,是潜在的较低延迟,机械上的较低的方法,以向机器人辅助手术的操作员提供力反馈。我们进行了一项飞行员可行性研究,其中参与者试图对机器人进行远程操作,以抓住和抬起鸡蛋而不会破裂或掉落它们。根据实验条件,机器人抓地力测量的力以不同的方式显示出不同的显示:仅视觉上或通过视觉上的电动舌刺激。参与者更成功地用舌刺激卵。这项初步研究的数据以及非正式访谈的见解表明,舌刺激有可能增强机器人辅助手术的功效和安全性。索引术语 - 光线,力反馈,机器人辅助手术,显示,舌头,感觉替代,电动刺激
什么是人工智能手术?
当我开始我的独立外科医生生涯时,我自诩为微创肝胰胆外科医生,我过去常常以“下一个前沿”作为我演讲的标题,这取决于我能做哪些新手术。我最终将我的一个演讲命名为“腹腔镜 Whipple 手术,最后的前沿”。我甚至想将这篇社论命名为“人工智能手术,最后的前沿”。事后回顾这一连串事件,很明显,手术永远不会有“最后的前沿”,而只会有下一个创新者和创新。我现在已经足够成熟,知道我的头脑无法理解未来为我们准备的极限。正是怀着这种好奇心,我决定接受这份新外科杂志《人工智能外科》(AIS)主编的邀请。虽然它也可以被称为数字外科、计算机化外科或简单的智能外科,但选择 AIS 是为了强调需要在外科护理中拥抱自主思考系统和主动独立机器人的前景。

运动障碍手术
The main instrument for analyzing intensity of symptoms in patients with PD is UPDRS.该量表已通过证据基于证据的医学研究[156]验证,与其他较不具体和全球尺度[157],[158]或专门针对QOL的量表相比,被视为参考标准(例如,帕克森氏病问卷[PDQ-39])。[8,49,71,80,107,112,115,159-170]在刺激性状态/术前药物治疗状态下,手术后的绝对UPDRS-II(日常生活)和UPDRS-III(运动活动)和UPDRS-III(运动的活动)的估计减少估计减少。[9,49,71]神经刺激导致与PDQ-39和UPDRS-III中单独的药物相比,神经刺激的改善明显更大。平均UPDRS-III分数在药物状态下提高了41%,在药物状态下提高了23%。[49]与基线值相比,UPDRS-III的STN-DBS相关改善随时间稳定,分别为1和5年,分别为66%和54%。在随访期为2到4年不等的其他研究中,报告了43%至57%的改善。[79,80,165,171-173]刚性和震颤的改善为70%至75%,而对于Akinesia来说,改善为50%。stn-dbs对外周期肌张力障碍有直接影响,术前的71%和只有19%和33%的患者在1和5年中观察到。姿势稳定性和步态也有所改善,但语音仅在第一年就有改善,然后在5年时逐渐恢复到基线。UPDRS-II的进步类似,但随着时间的流逝而发生严重恶化。多巴胺能药物的平均术后减少为50%[49]至56%。[129]结果,左旋多巴引起的运动障碍,随之而来的残疾和持续时间分别降低了69%,58%和71%,对质量质量有重大影响。[49],[52]这一发现主要反映了长期刺激诱导的神经元可塑性和左旋多巴的脱敏。[174-176]这是通过与左旋多巴搏动性给药相关的诱导运动障碍的机制来解释的。[53]如前所述,通过STN刺激的有益作用减少或停止了这些药物不良反应,从而恢复了纹状体多巴胺能受体的更正常的药代动力学方案。术后运动症状适中[112],[163]或不通过STN-DBS改善[8]。 此外,这些UPDRS-III数据忽略了改善的时间维度,因为在药物摄入量后的波动益处被稳定的改善所取代,而稳定的改善反映了“ ON”时间的增加约47%至71%。 [9,49,52,71,112,160,166] STN-DBS [8,9,112]通常比其他帕金森氏症迹象更少改善。 低音症可能会改善,或者由于电流扩散到皮质骨纤维而可能会加重构音障碍。 [177]因此,患者的满意度,尤其是关于低音症和与家人交流的能力,可以在手术后下降。 据报道,据报道,睡眠结构[178]和质量[179]的改善,总睡眠时间增加(高达47%),从而间接地导致了夜间的智慧和清晨的肌张力障碍。 [178] STN刺激也可以通过减少逼尿肌超反射率来有效地改善空隙控制。术后运动症状适中[112],[163]或不通过STN-DBS改善[8]。此外,这些UPDRS-III数据忽略了改善的时间维度,因为在药物摄入量后的波动益处被稳定的改善所取代,而稳定的改善反映了“ ON”时间的增加约47%至71%。[9,49,52,71,112,160,166] STN-DBS [8,9,112]通常比其他帕金森氏症迹象更少改善。低音症可能会改善,或者由于电流扩散到皮质骨纤维而可能会加重构音障碍。[177]因此,患者的满意度,尤其是关于低音症和与家人交流的能力,可以在手术后下降。据报道,据报道,睡眠结构[178]和质量[179]的改善,总睡眠时间增加(高达47%),从而间接地导致了夜间的智慧和清晨的肌张力障碍。[178] STN刺激也可以通过减少逼尿肌超反射率来有效地改善空隙控制。[180],[181]