XiaoMi-AI文件搜索系统
World File Search System挑战赛
开放人工智能挑战赛
UNO 与 OpenAI 合作,发起了一项 Open AI 挑战赛!Open AI 挑战赛将用于向最多 1000 名用户授予 UNO 企业版 ChatGPT 访问权限,从而允许在课堂和整个校园内创新使用 ChatGPT。为您的课程创建自定义 GPT,将其集成到您部门的日常工作中,将其用于您的研究或其他领域 - 使用 ChatGPT Enterprise 可提供增强的数据隐私和安全保护,从而实现出色的创新和集成。我们邀请教职员工在 8 月 1 日的优先截止日期之前提交 ChatGPT Enterprise 许可证提案(申请人无需支付任何费用)。RFP 流程将保持开放,提交截止日期为 8 月 31 日,以配合教职员工的时间表和秋季学期。 UNO 企业 ChatGPT 环境的访问权限每次只提供一学期,因此本轮入选人员将可以访问至 2024 年 12 月。如果个人希望在多个学期内保持访问权限,则需要为额外的 2025 年春季或夏季学期完成新的 RFP。开放 AI 挑战赛的获奖者将被要求在春季学期的年度 UNO AI 峰会上展示他们的用例和成果。
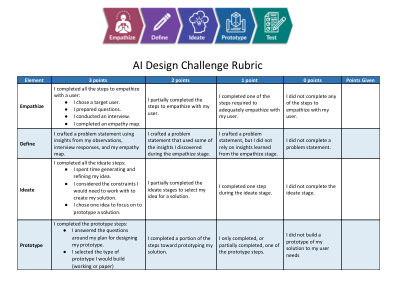
人工智能设计挑战赛评分标准
我确定了 AI 如何成为问题的创造性解决方案。我在设计过程中考虑了限制因素。在设计过程中,我预见并解决了解决方案面临的挑战。我从头到尾规划并考虑了用户的体验。我反思了从我的设计经验中获得的见解和成长领域。
以人为本的工程设计挑战赛 2024-5
南非是自 15 世纪末以来被欧洲殖民的众多国家之一,首先是荷兰人,然后是英国人。在殖民时期和随后的种族隔离制度下,由于土地所有权被侵占、优质教育有限、技术性就业受到严重限制,大多数南非人的收入机会有限。2024 年 4 月是南非首次民主全种族选举 30 周年,非洲人国民大会 (ANC) 赢得了选举,标志着种族隔离制度正式结束。然而,30 年后,贫困、失业和不平等水平仍然存在,腐败、欺诈和通过“国家俘获”挪用资金(见政治和地方政府部分)现象十分普遍。虽然种族隔离结束后的重大干预措施
2022-2023 年 KidWind 挑战赛
多年后的 2009 年,在 NYSERDA 的支持下,KidWind 在纽约州举办了前四届 KidWind 挑战赛。这些活动的灵感来自风能挑战赛 WindEng,我们发现该挑战赛正在加拿大圭尔夫大学举行。圭尔夫大学有一个真正的风洞 --- 所以我们首先需要解决一个大问题。如果我们要在各个地方举办挑战赛,我们需要一个便携式风洞。专家告诉我们,制造一个便携式风洞需要花费 5 万美元,所以我们把它带给了不同的专家,并给了一群高中生 1000 美元来建造一个便携式风洞——他们做到了!我们把这个庞然大物带到了全州各地参加我们的四场挑战赛。它并不完美,但哇,它很有趣。参加完前四项活动后,我们就迷上了。我们花了 10 年时间完善 KidWind 挑战,我们致力于让它们变得更好、更有趣、更具挑战性!
ICMR 世界挑战赛第一名
这将激励我们的科学家提出创新的想法,以找到解决棘手健康问题的方案。该计划旨在促进新颖、突破性、前瞻性的想法、新知识的产生、突破性健康技术的发现/开发(疫苗、药物/治疗、诊断、干预等),这些技术迄今为止从未在世界上被想到、测试或尝试过。该提案必须具有大胆的研究理念,具有广泛的重大影响,如果成功,应该具有潜在的“首创”生物医学和技术创新,以在全球范围内实现更好的健康结果。旨在实现“增量”知识或“流程创新”的提案将不会通过该计划获得资助。

梅赛德斯-奔驰 car2space 挑战赛
加入 INNOspace Masters 的梅赛德斯-奔驰 car2space 挑战赛。创造您自己的 car2space 创新:› 探索自动驾驶汽车高清地图中的地球观测数据或发明供应链监控解决方案› 为混合电信设备(地面 x 轨道)设计颠覆性的自组织网络› 创建新的空间业务服务以增强自动驾驶汽车的导航› 利用虚拟现实、增强现实、混合现实 (VR/AR/MR)、AI/ML、传感器、模拟和数字孪生等尖端技术进行创新› 或基于生命使能技术开发创新,以实现自给自足的系统(能源、水、氧气、材料)
全国青少年创新者挑战赛
我们的技术——Hydrometrics——一款水量跟踪软件——提供了一种解决这一问题的有效机制。Hydrometrics 是一款用户友好的软件,旨在帮助用户监控他们的日常用水量和节水量。它的界面允许他们为自己和家人建立账户,跟踪他们的日常用水量和补水水平。它为他们提供提醒、通知和提示,帮助他们每天尽量减少水的浪费。它会告诉他们某项活动需要多少水,并在他们用水过多时向他们发出警告。它还通过提供每周记录来激励他们,记录他们一周内节约了多少水。
ICPC游戏AI挑战赛
语言支持状态说明 C++ 包含官方 JSON 解析器。内置 Python 3 官方 JSON 解析器。Python 2 非官方* 内置 JSON 解析器,修改 Python 3 模板。Java 非官方 没有 JSON 解析器或本地包支持。Kotlin 非官方 没有 JSON 解析器或本地包支持。C 非官方* 没有 JSON 解析器或本地包支持。Objective-C 非官方* 没有 JSON 解析器或本地包支持。C# 非官方* JSON 解析器可能不可用。没有本地包支持。F# 未知(查看 C# 示例,看看是否可以转换它) Rust 非官方* 没有 JSON 解析器或本地包支持。Go 未知 PHP 未知 Prolog 未知 COBOL 非官方* 无 JSON 解析器或本地包支持。Haskell 未知 Pascal 未知 Ruby 未知 Node.js 未知 SpiderMonkey 未知 Common Lisp 未知

第五届 AI 城市挑战赛
AI 城市挑战赛的创立秉承两个目标:(1)推动智能视频分析研究和开发的边界,以实现更智能的城市用例;(2)评估性能水平足以引起现实世界采用的任务。交通运输是适合采用该技术的一个领域。第五届 AI 城市挑战赛吸引了来自 38 个国家的 305 支参赛队伍,他们利用城市规模的真实交通数据和高质量的合成数据在五个挑战赛道上展开角逐。赛道 1 涉及基于视频的自动车辆计数,评估内容包括算法有效性和计算效率。赛道 2 涉及城市规模的车辆重新识别,使用增强合成数据大幅增加了该任务的训练集。赛道 3 解决了城市规模的多目标多摄像头车辆跟踪问题。赛道 4 解决了交通异常检测问题。赛道 5 是一条新赛道,使用自然语言描述解决车辆检索问题。评估系统显示了所有提交结果的一般排行榜,以及仅限于比赛参与规则的结果公开排行榜,其中团队不得在工作中使用外部数据。公开排行榜显示的结果更接近注释数据有限的真实情况。结果显示了人工智能在智能交通中的前景。某些任务的最新性能表明这些技术已准备好在现实世界系统中采用。