XiaoMi-AI文件搜索系统
World File Search System掌握

g-hop:相互作用重建的生成性手动对象和掌握合成
和一个锅的不同)或意图(例如通过刀与使用它进行切割),我们人类可以毫不费力地描绘出与日常生活中日常物体的这种互动。在这项工作中,我们的目标是构建一个可以同样生成合理的手动配置的计算系统。具体来说,我们学习了一个基于扩散的常规模型,该模型捕获了3D相互作用期间手和对象的关节分布。给定一个类别的描述,例如“握着板的手”,我们的生成模型可以合成人手的相对配置和表达(见图1个顶部)。我们解决的一个关键问题是,该模型是什么好的HOI表示。通常通过空间(签名)距离场来描述对象形状,但人的手通常是通过由发音变量控制的参数网格建模的。我们提出了一个均匀的HOI表示,而不是在生成模型中对这些不同的代表进行建模,并表明这允许学习一个共同生成手和对象的3D扩散模型。除了能够合成各种合理的手和物体形状的综合外,我们的扩散模型还可以在跨任务的辅助推理之前作为通用,而这种表示是所需的输出。例如,重建或预测相互作用的问题对于旨在向人类学习的机器人或试图帮助他们的虚拟助手来说是核心重要性。重建的视频重新投影错误)或约束(例如我们考虑了这些行沿着这些行的两个经过深入研究的任务:i)从日常交互剪辑中重建3D手对象形状,ii)鉴于任意对象网格,合成了合理的人类grasps。为了利用学到的生成模型作为推论的先验,我们注意到我们的扩散模型允许在任何手动对象配置给定的(近似)log-likelihood梯度计算(近似)log-likelihoodhoodhood。我们将其纳入优化框架中,该框架结合了先前的基于可能性的指南与特定于任务的目标(例如已知对象网格的合成)推理。虽然理解手动相互作用是一个非常流行的研究领域,但现实世界中的数据集限制了3D中这种相互作用的限制仍然很少。因此,我们汇总了7种不同的现实世界交互数据集,从而导致157个对象类别的相互作用长期收集,并在这些范围内训练共享模型。据我们所知,我们的工作代表了第一个可以共同生成手和对象的生成模型,并且我们表明它允许综合跨类别的各种手动相互作用。此外,我们还经验评估了基于视频的重建和人类掌握合成的任务的先前指导的推断,并发现我们所学的先验可以帮助完成这两个任务,甚至可以改善特定于特定于任务的状态方法。
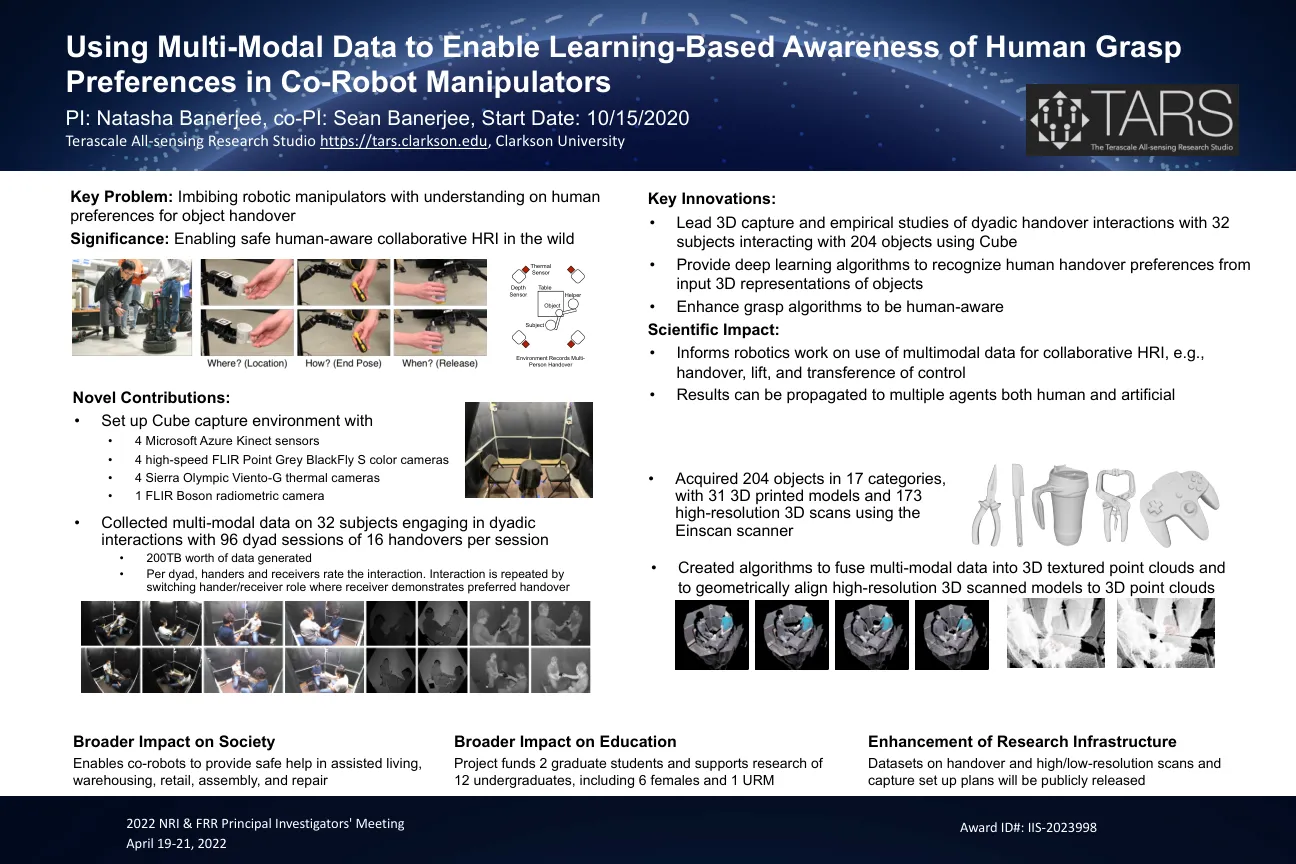
使用多模式数据来实现基于学习的人类掌握偏好的认识
•铅3D捕获和经验研究与32个受试者使用Cube与204个对象相互作用的二元移交相互作用•提供深度学习算法,以识别物体输入3D表示的人类移交偏好•增强掌握算法是人为意识到的科学影响:

学习用交互式视觉失败预测掌握混乱中的
摘要 - 现代仓库处理数百万个独特的物体,这些物体通常存储在密集的容器中。为了在此环境中自动化任务,机器人必须能够从高度混乱的场景中挑选各种对象。现实世界学习是一种有前途的方法,但是在现实世界中执行选秀权是耗时的,可能会导致昂贵的失败,并且通常需要大量的人类干预,这会导致操作负担并限制数据收集和部署的范围。在这项工作中,我们利用交互式探针在不完全执行选片的情况下视觉评估杂物中的grasps,我们称为交互式视觉失败(IVFP)。这可以在执行过程中对GRASP的自主验证,以避免昂贵的下游失败以及自主奖励分配,从而提供监督以连续塑造并改善机器人在现实世界中的经验,而无需不断需要人类干预。通过在RESTARTH RE1机器人上进行实验,我们研究了IVFP对绩效的影响 - 无论是在有效的数据吞吐量和成功率方面,都表明这种方法会导致掌握单独接受人类监督的政策的政策,同时需要减少人为干预。代码,数据集和视频,请访问https://robo-ivfp.github.io

促进自我效能和自主动机,以帮助掌握高级写作技巧
该论文是由DigitalCommons@csp的教育与人文学院免费带给您的。已被DigitalCommons@csp的授权管理员纳入研究生教师教育。有关更多信息,请联系DigitalCommons@csp.edu。

启用了脊髓损伤中的自愿性手掌握恢复
宫颈脊髓损伤后的手功能丧失严重损害了功能独立性。我们描述了一种在一个完全宫颈四肢瘫痪(C5美国脊柱损伤关联量表a)中,使用便携式全植入式脑部计算机界面的一个完全宫颈四肢瘫痪量(C5美国脊柱损伤关联量表a)的方法来恢复手动掌握的能力控制。大脑 - 计算机界面由放置在主要手动皮层上的硬膜下表面电极组成,并连接到锁骨下方皮下植入的发射器,从而可以连续读取皮层学活性。运动意愿来触发主要手的功能性电刺激。移动信息信息可以在29周内的阶段性研究中进行一致的解码,平均准确性为89.0%(范围为78–93.3%)。在各种上肢任务的速度和准确性中都观察到了改进,包括提起小物体并将对象传输到特定目标。在开环试验期间,在家解码的准确性达到91.3%(范围80-98.95%),在闭环试验期间的授予率为88.3%(范围77.6-95.5%)。重要的是,本研究未探索功能结果和解码器指标的时间稳定性。完全植入的大脑 - 计算机界面可安全地用于可靠地从运动皮层中移动,从而可以准确地对手掌握。

AI专利简介(42)了解AI专利!掌握它们!〜Vision Transformer...
1 Alexey Dosovitskiy、Lucas Beyer、Alexander Kolesnikov、Dirk Weissenborn、Xiaohua Zhai、Thomas Unterthiner、Mostafa Dehghani、Matthias Minderer、Georg Heigold、Sylvain Gelly、Jakob Uszkoreit、Neil Houlsby “一张图片胜过 16X16 个单词:用于大规模图像识别的 Transformers” arXiv:2010.11929v2 [cs.CV] 2021 年 6 月 3 日

掌握EV Revolution:通过Fastmarkets的电池材料见解和预测推动业务成功
随着呼吁更经济实惠的电动汽车的呼吁,供应链的压力也越来越大。这种增长的需求使电池材料(如钴和锂的价格)推向了多年高点。电池是电动汽车的命脉,不仅是关键组成部分,而且通常占电动汽车总成本的很大一部分,约占其总体价值的30%至40%。这些价格激增的影响是深远的,对潜在的电动汽车采用者产生了不确定性的阴影。这使得对电动汽车的更广泛采用成为越来越复杂和计算出的决定,价格波动为消费者带来了犹豫。

电子编码:通过验证的模型和专家编码组掌握有效的代码生成
上下文:随着摩尔定律的衰落,软件行业正在为寻找持续性能增强的替代解决方案而越来越重要。近年来,软件性能优化的显着性和研究结果一直在上升,尤其是随着L arge l Anguage M Odel S(LLMS)推动的进步。然而,纠正性能缺陷的传统策略在竞争代码效率优化水平上显示出很大的限制,并且对该主题的研究令人惊讶。目的:本研究旨在解决该领域的研究差距,从而为遇到的各种挑战提供实用的解决方案。具体来说,我们已经克服了传统绩效错误整流策略的限制,并开发了针对竞争性代码效率优化领域量身定制的a andel model(LM)。方法:我们引入了电子代码,一个高级程序合成LM。受到专家LMS最近成功的启发,我们设计了一个名为专家编码组的创新结构。该结构采用多个专家编码器来提取针对不同输入类型的功能。我们在竞争性数据集中评估了电子代码对其他领先模型的性能,并进行了深入的消融实验。结果:在系统评估后,电子码的代码效率提高了54.98%,明显优于其他高级模型。在消融实验中,我们进一步验证了专家编码组和电子代码中其他组件的重要性。结论:研究结果表明,专家编码组可以有效地处理效率优化任务的各种投入,从而大大提高了模型的性能。总而言之,本研究铺平了新的途径,用于开发系统和方法,以帮助程序员编写有效的代码。

引入 Block-Toeplitz 协方差矩阵重新掌握事件相关电位脑机接口的线性判别分析
摘要 — 由于维数较高,噪声多通道脑电图时间序列数据的协方差矩阵难以估计。在基于事件相关电位和线性判别分析 (LDA) 进行分类的脑机接口 (BCI) 中,解决这个问题的最新方法是通过收缩正则化。我们提出了一个新想法来解决这个问题,即对 LDA 的协方差矩阵实施块 Toeplitz 结构,这实现了每个通道在短时间窗口中信号平稳的假设。在 13 种事件相关电位 BCI 协议下收集的 213 名受试者的数据上,与收缩正则化的 LDA(最多 6 个 AUC 点)和黎曼分类方法(最多 2 个 AUC 点)相比,由此产生的“ToeplitzLDA”显著提高了二元分类性能。这意味着应用程序级别的性能得到了极大改善,例如在无监督视觉拼写器应用程序中记录的数据,其中 25 个受试者的拼写错误平均可以减少 81%。除了 LDA 训练的内存和时间复杂度较低之外,ToeplitzLDA 被证明即使在 20 倍的时间维度扩大后也几乎保持不变,这减少了对特征提取专家知识的需求。
风能和太阳能光伏系统的联合调度策略,以掌握竞争市场的不平衡成本
摘要:可再生能源与活性热电厂的整合有助于全球绿色环境。要实现可再生 - 热杂交系统的最大可靠性和可持续性,需要考虑大量约束,以最大程度地减少情况,这是由于可再生能源的不可预测性而产生的。在风集成放松管制的系统中,风电场需要在运行日期之前向独立系统操作员(ISO)提交发电场景。基于他们提交的出价,ISO安排了来自不同生成站的发电,包括热和可再生。由于风流的不确定性质,总是有可能不填充风电场的日程安排量。市场中这种违规行为可能会对发电公司施加经济负担(即失衡成本)。太阳能光伏电池可用于减少放松管制系统中不可预测的风饱和度的不利经济影响。本文为太阳能光伏和风电场的混合操作提供了一致,胜任和有效的操作方案,以最大程度地降低不平衡成本,这是由于实际风速和预测风速之间的不匹配而导致的不平衡成本。修改的IEEE 14-BUS和修改IEEE 30总线测试系统已用于检查所提出的方法的有用性。在这项工作中使用了三种优化技术(即,序列二次编程(SQP),智能花优化算法(SFOA),蜂蜜ba算算法(HBA))进行了比较研究。在这里提出了总线加载因子(BLF),以识别系统中最敏感的总线,用于放置风电场。SFOA和HBA优化技术已在这种类型的经济评估问题中第一次使用,这是本文的新颖性。在此处引入了总线加载因子(BLF),以识别系统中最敏感的总线。实施工作后,已经可以看到,太阳能光伏系统的运行减少了不平衡成本对可再生综合失调电源系统的不利影响。