机构名称:
¥ 1.0
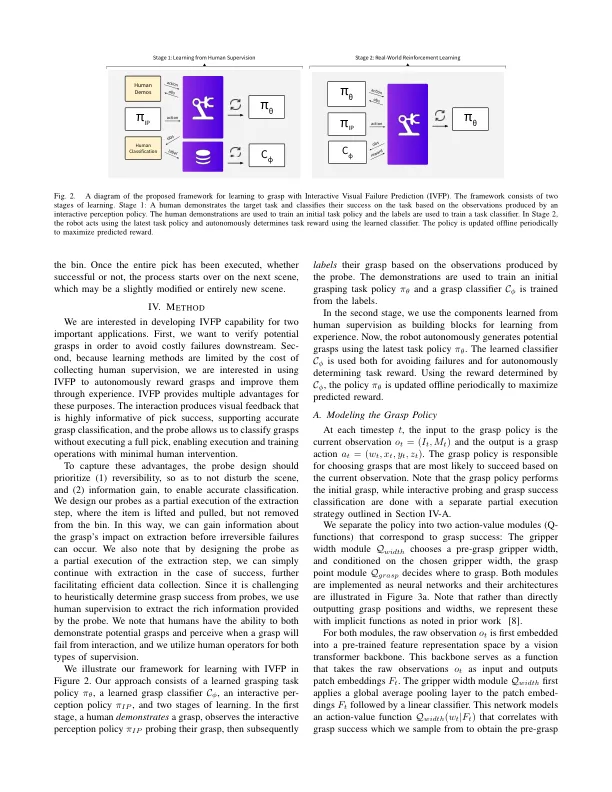
摘要 - 现代仓库处理数百万个独特的物体,这些物体通常存储在密集的容器中。为了在此环境中自动化任务,机器人必须能够从高度混乱的场景中挑选各种对象。现实世界学习是一种有前途的方法,但是在现实世界中执行选秀权是耗时的,可能会导致昂贵的失败,并且通常需要大量的人类干预,这会导致操作负担并限制数据收集和部署的范围。在这项工作中,我们利用交互式探针在不完全执行选片的情况下视觉评估杂物中的grasps,我们称为交互式视觉失败(IVFP)。这可以在执行过程中对GRASP的自主验证,以避免昂贵的下游失败以及自主奖励分配,从而提供监督以连续塑造并改善机器人在现实世界中的经验,而无需不断需要人类干预。通过在RESTARTH RE1机器人上进行实验,我们研究了IVFP对绩效的影响 - 无论是在有效的数据吞吐量和成功率方面,都表明这种方法会导致掌握单独接受人类监督的政策的政策,同时需要减少人为干预。代码,数据集和视频,请访问https://robo-ivfp.github.io
学习用交互式视觉失败预测掌握混乱中的
主要关键词




相关文件推荐