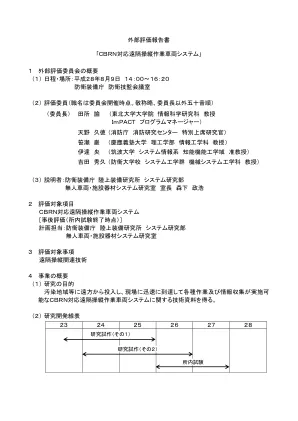
XiaoMi-AI文件搜索系统
World File Search System摆幅

风轮疲劳寿命预测及强度退化...
R.P.L. Nijssen 摘要 风力涡轮机转子叶片承受大量高度可变的载荷,但寿命预测通常基于恒幅疲劳行为。因此,确定如何根据恒幅疲劳行为估算变幅疲劳下的使用寿命非常重要。寿命预测包含不同的元素:计数方法、描述 S-N 曲线的公式、恒定寿命图和损伤规则。对于损伤描述,研究并比较了两种模型,即 Miner 和法和基于强度的寿命预测。在 Miner 和法中,计数法和恒幅疲劳行为描述的结果被转换为损伤参数“Miner 和”。不考虑载荷顺序的潜在影响,损伤参数的值仅表示是否发生故障:它与物理上可量化的损伤无关。在基于强度的方法中,通过计算每个载荷循环对强度的影响来预测寿命,直到载荷超过剩余强度。这种循环方法的预期优势是可以隐式地包含序列效应。此外,损伤参数始终与物理上可量化的参数(即强度)相关。成功应用基于强度的方法需要描述疲劳后强度,这需要大量的ex

申请建筑/拆卸许可证
a. 第一幅图,即图 T-1,应为标题页,其中包含“萨福克郡公共工程部”,其下紧接着显示部门,其下为项目描述,其下为建筑编号和位置。图索引应位于右上角。应包括萨福克郡轮廓图和郡建筑师/总工程师和委员批准框。 b. 第二幅图,即图 GN-1,应包含一般说明、现场地图和地块平面图。 c. 第三幅图,应包含以下代码审查表: i. 对于新建筑的建设,图纸应为最近开发的 CR-1 至 CR-4。这些图纸参考“建筑规范”。 ii. 对于现有建筑的拟建工程,图纸应为最近开发的 CR-1。此图纸参考“现有建筑规范”。 2. 对于任何和所有 DPW 签约顾问项目 -
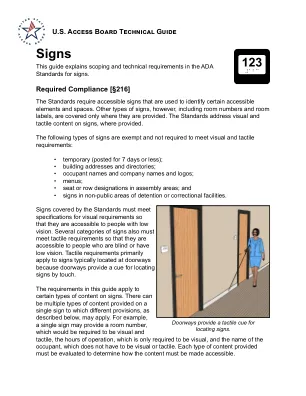
ADA 指南第 7 章 - 标志
触觉字符的中心位置必须留出至少 18 英寸 x 18 英寸的净地板空间。净地板空间的这种放置方式为标志处提供了无障碍站立空间,以便通过触摸读取。该空间的高度不得超过 80 英寸。为了安全起见,该空间必须位于任何门摆弧线之外,以达到 45° 的开启位置。这实际上设定了触觉标志与外摆门之间的最小距离,但不是绝对距离。虽然净地板空间必须位于触觉字符的中心位置,但标志可以位于门摆之外的不同距离处。
基于侧窗滤波的脑图像融合方法
脑医学图像融合在构建当代图像以增强相互和重复信息以用于诊断目的方面起着重要作用。提出了一种对脑图像使用基于核的图像滤波的新方法。首先,使用双边滤波器生成源图像的高频分量。其次,估计第一幅图像的强度分量。第三,对几个滤波器采用侧窗滤波,包括引导滤波器、梯度引导滤波器和加权引导滤波器。从而最小化第一幅图像的强度分量与第二幅图像的低通滤波器之间的差异。最后,基于三个评估指标对融合结果进行评估,包括标准差(STD)、特征互信息(FMI)、平均梯度(AG)。基于该算法的融合图像包含更多信息、更多细节和更清晰的边缘,有助于更好地诊断。因此,我们基于融合图像的方法能够很好地找到目标体积的位置和状态,从而远离健康部位并确保患者的健康。


空补处契约入札公告第193号- 令和6年11月11日
6 天前 — 防卫政策局局长、采购、技术与后勤局局长(以下简称“防卫省提名暂停局”)......三荣化研株式会社 S-6 美国军用标准 MIL-PRF-131K 1 级 长度 100 码 x 宽度......

Segway的设计与开发
Segway是由Dean Kamen于2001年推出的,它是一款两轮,自动平衡,电池供电的电子车辆,可保持其自身的平衡和乘客的平衡。它配备了一个固定的T形控制轴,该控制轴安装在安装在两个平行轮上的平台中。segways被驱动地站起来,根据人体动态:向前倾斜,向前移动,直立站着停下来,向后倾斜以倒退。该设备没有制动器或加速器,但有一个用于转弯的手夹。它是唯一能够像人一样到位的车辆,因为其车轮具有朝相反方向转向的能力。对于两轮自动平衡机器人,稳定性至关重要,因为它们不能在不努力的情况下保持直立(平衡)。正如其名称所表明的那样,倒置的摆板是一个摆在枢轴上方的摆,不像传统的摆板那样低于传统的摆。一个自平衡的机器人,例如Segway,是倒置的扩展版本。本文使用陀螺仪传感器,Arduino-Unor3开发板和电池供电的电动机描述了Segway的设计和构造。与原始的Segway相比,我们所提供的设计将使Segway花费约30,000,而Segway的费用约为30万,加上税收,从而使产品成本有效。Segway是两轮,自动平衡,电池供电的电动汽车。Segway在最佳使用条件下的最大范围为25 km(否