XiaoMi-AI文件搜索系统
World File Search System摆臂
使用计算机视觉控制旋转倒置的摆系统
这项工作是根据创意共享归因 - noncmercial- noderivatives 4.0国际许可证(http://creativecommons.org/licenses/by-nc-nc-nd/4.0/)的许可。您可以将材料复制并重新分配到任何媒介或限制中,提供适当的信用,链接到许可证并指示您所做的更改。您可以以任何合理的方式这样做,但不要以任何建议许可人认可您或您的使用。您不得将材料用于商业文件。如果您在材料上进行混音,转换或构建,则不得分发修改后的材料。本论文中的图像或其他第三方材料包含在本书的创意共享许可中,除非在材料的信用额度中另有说明。如果本书的创意共享许可中未包含材料,并且您的预期用途不受法定法规的允许或超过允许的用途,则您需要直接从版权所有者那里获得许可。使用一般描述性名称,注册名称,商标,服务标记等。在本出版物中,即使没有具体的说法没有相关的保护法律和法规,因此也没有暗示。

脑机接口中的多臂老虎机
多臂老虎机 (MAB) 问题模拟了一个决策者,该决策者根据当前和获得的新知识优化其行动以最大化其回报。这种类型的在线决策在脑机接口 (BCI) 的许多程序中都很突出,MAB 以前曾用于研究,例如,使用哪些心理命令来优化 BCI 性能。然而,BCI 背景下的 MAB 优化仍然相对未被探索,即使它有可能在校准和实时实施期间提高 BCI 性能。因此,本综述旨在向 BCI 社区进一步介绍 MAB 的成果丰硕的领域。本综述包括 MAB 问题和标准解决方法的背景,以及与 BCI 系统相关的解释。此外,它还包括 BCI 中 MAB 的最新概念和对未来研究的建议。

无线手部运动控制机器人夹持臂
在各种自动化行业中,无线活动是必需的,特别是在危险或危险区域的偏远地区。在许多行业中,需要处理一些非常热的工作,而人手无法做到,在这种情况下,无线操作效率更高。该项目专注于使用微控制器在 X-bee 和无线传感器网络的帮助下设计手势控制的机械臂。它由两部分组成,通过无线传感器通信系统相互连接。X-bee 将充当发射器和接收器设备系统。主要部分由装有锂离子电池、微控制器和柔性传感器的手套组成。第二部分由电机、微控制器和机器人手指组成,机械动作通过它们发生。

用EEG信号自动操纵机器人臂
摘要 - 该项目具有客观地识别使用传感器“情感EEG Neuroset”的一些面部表情。此设备是一种能够通过脑电图技术(EEG)接收和解释大脑生物电活动的传感器,此外,还具有16个通道,并连续准确接受脑电波。此外,传感器具有易于使用的SDK,即使没有任何大脑信号获取经验,任何人即使没有任何经验。Emotiv®数据被转移到MATLAB®进行过滤脑电波,以通过串行通信向Arduino发送信息。因此,在Arduino板上获得了三种不同表达式的识别,即眨眼,眨眼和微笑,每个表达式在Arduino板上都有不同的LED颜色。

提高制造效率:新的机器人臂...
本研究提出了一种最新的机器人臂系统,旨在改善注塑机的组装线中的选择和包装程序。该系统通过整合带有多功能最终效应子的六度自由机器人手臂来解决重大的工业困难,包括劳动力和高错误率。该设计的一个出色特征是类人动物的手,根据任务的需求,已精心构造,以真空,PINCE或其他特定工具的方式易于替换。机器人系统是使用AutoCAD,Fusion 360和SolidWorks创建的,可确保准确性和灵活性。这种适应性能够实现各种用途,从而极大地提高了运营效率和卓越性能,同时最大程度地减少了对手动工作的需求。调查结果说明了这种机器人系统将在许多生产行业中部署的能力,从而强调了其灵活性和可扩展性。
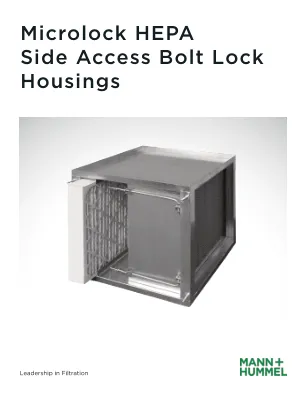
Microlock HEPA 侧门螺栓锁外壳
Microlock HEPA SA 螺栓锁外壳采用摆动螺栓锁定机制,确保过滤器和外壳垫圈之间完美密封,并降低关键环境中空气旁路的可能性。此密封通过外壳内部的连续平面安装表面实现,该表面与过滤器上的周边垫圈配合。创建此密封只需将摆臂定位在过滤器旁边,然后定位并拧紧弹簧夹以将过滤器固定在外壳的周边安装表面上。

基于数字孪生的折臂起重机状态监测
本文介绍了一种用于小型折臂起重机状态监测的数字孪生实现新方法。起重机的数字孪生在非线性有限元 (FE) 程序中实时模拟,其中估计的有效载荷重量用作输入。我们实施了一种基于物理应变计测量的重量及其力矢量方向估计的逆方法。使用额外的应变计来验证数字孪生和逆方法的准确性。基于一些物理传感器输出,数字孪生可以实时确定无限数量的热点处的应力、应变和负载。因此,数字孪生可以成为预测性维护和产品生命周期管理的有效工具。此外,在重物作业期间对起重机的状态进行监测可以提高安全性和可靠性。所提出的方法以通用方式描述,适用于行业中使用的各种机器人操纵器。

基于颜色和形状的物体排序的机器人臂
对象分类机器人臂正在彻底改变我们的流程,使它们更有效,并为未来的自动化奠定了基础。它正在开辟我们处理和分类材料的新时代,尤其是随着技术的不断发展。但是,它确实有挑战。机器人臂必须适应不同类型的对象和现实世界环境,这可能很棘手。研究人员一直在努力提高其功能,以确保其顺利集成到各种环境中。随着技术的进步,该机器人部门的潜在应用正在扩大。它可用于详细的装配线,甚至用于个性化的物流。这项技术的持续发展强调了其在转型行业中的重要性。我们正在走向智能机器人系统将播放

机器人臂角电动机的实施论文
“机器人臂角电动机应用”代表了机器人和自动化最前沿的开拓性项目。在当今动态的工业景观中,机器人武器在从制造业到医疗保健的各个领域都起着关键作用。但是,编程和协调这些机器人武器的复杂性经常提出挑战。该项目介绍了专门为机器人武器设计的创新软件应用程序。主要目标是创建一个用户友好的界面,该界面简化了机器人臂的编程和控制,使用户能够轻松地定义,管理和优化操作序列。高级控制算法确保实时监控和协调,增强各种应用程序中的精度和适应性。预期的结果包括一个强大的工具,可以改变机器人武器的操作方式。制造业,物流,医疗保健和农业等行业将受益于提高效率,降低复杂性和改善自动化。随着机器人技术的不断发展,机器人序列的机器人序列应用程序的应用是变革性变化的催化剂,并有望在各个域中更容易访问,多功能和必不可少的机器人臂。