XiaoMi-AI文件搜索系统
World File Search System操作者

有条件的概率和量子中的后验状态...
本文的目的是提供一个有条件的概率的概念,该概率自然是在连续量子观察物的测量中。量子测量中有条件期望的概念首先出现在中村 - 乌梅格基[11]中,而umegaki [19]在操作者代数理论中已经发展了这种条件期望的形式理论。但是,这种条件期望的概念只能应用于阿尔维森[2]所示的离散可观察物的测量。因此,我们必须从量子测量过程中量子机械条件概率的原始统计解释开始。我们从先验状态确定A后验状态的方法是概率理论中贝叶斯原理的一种变体,该变体首次出现在von Neumann [12; pp。337-346]在量子力学中。

肥胖和超重:开发减肥药物和生物制品
其他评估肥胖的方法也有重大的局限性。皮褶厚度的评估依赖于操作者,并且可重复性相对较差。生物电阻抗 89 可能因个人的水合状态而异。成像方式,例如双 90 X 射线吸收仪 (DXA) 或磁共振成像,可以提供更精确的 91 体脂测量值,但价格昂贵,并且需要使用多个盲法中央读取器才能在 92 试验中实施。基于成像变化的试验结果可能不适用于 93 患者的临床护理,而基线 BMI 和体重或 BMI 的百分比变化 94 在任何办公室或诊所都可以获得。此外,基于成像或其他 95 方式的脂肪量变化与临床结果的联系并不像 BMI 变化那样明显。96
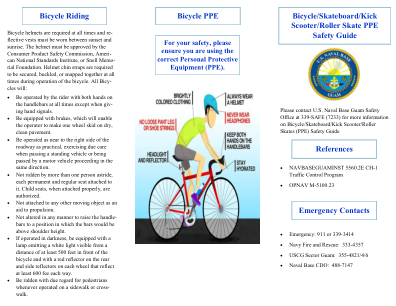
自行车/滑板/滑板车/溜冰鞋 PPE 安全...
除打手势时外,骑行者必须始终用双手握住车把。 配备刹车,使操作者能够使一个车轮在干燥、干净的路面上打滑。 尽可能靠近道路右侧驾驶,在超越停放的车辆或被同方向行驶的机动车超越时要小心谨慎。 不得让多人跨骑,每个永久和常规座椅都应固定在车把上。儿童座椅在正确安装后是允许的。 不得固定在任何其他移动物体上作为推进辅助工具。 不得以任何方式改装车把以使其高于肩部。 如果在黑暗中驾驶,必须配备一盏白光灯,该灯在自行车前方至少 500 英尺处可见,并在车后配备红色反光镜,每个车轮配备侧面反光镜,每个方向的反光镜至少可反射 600 英尺的光线。 在人行道或人行横道上行驶时,应充分注意行人。

使用 EndoVac 冲洗进行手动、旋转和往复式器械根尖脱位的比较评估:一项体外研究
根管治疗包括对根管进行生物力学准备,以消除所有细菌和坏死的牙髓碎片,然后用惰性材料填充以密封暴露的小管。该程序旨在消除与牙髓和牙周组织刺激相关的疼痛和不适。然而,这种治疗并非没有并发症。在根管治疗期间或之后,冲洗剂或碎片从根尖挤出是操作者的主要担忧,因为它会导致根尖器官剧烈疼痛、肿胀和发炎。微生物、其内毒素以及偶尔的冲洗液经常通过含有残留牙髓组织的牙本质碎片的尖端输送到根尖组织中。在清洁和塑造根管系统的过程中,任何类型的对根尖组织的物理或化学损伤都可能导致肥大细胞脱粒,从而将组胺释放到根尖组织中 [1] 。在某些情况下,它可能会出现爆发和免疫反应。

CHEAPR 实施手册 第 1 页,共 27 页 修订日期:2025 年 1 月 1 日
机动车 – 任何以非肌肉动力推动或牵引的车辆,但飞机、摩托艇、压路机、火车站或其他公共交通设施使用的行李车、残疾人士驾驶且速度不超过十五 (15) 英里每小时的电池供电轮椅、仅用于从高尔夫球场一处穿越至另一处而在高速公路上行驶的高尔夫球车、州政府雇员在州政府机构场地上的道路和高速公路上驾驶的高尔夫球车式车辆、农业拖拉机、农具、仅在轨道或铁轨上行驶的车辆、自走式扫雪机、吹雪机和割草机(用于其设计用途且速度不超过四英里每小时)除外,无论操作者是骑在这些设备上还是在后面行走、机动自行车(定义见康涅狄格州一般法规第 14-286 条)和特殊移动设备(定义见康涅狄格州一般法规第 14-286 条)。 § 14-165、迷你摩托车(定义见康涅狄格州法规§ 14-289j)、电动自行车、电动脚踏滑板车以及任何其他不适合在高速公路上行驶的车辆。

牙科中的数字印模
摘要 制作印模一直是牙科的重要组成部分。由于存在诸如呕吐、味道难闻等诸多问题,因此以前都是使用传统印模材料(如藻酸盐、琼脂和弹性印模)来完成的。数字印模和数字扫描仪是最新方法之一。传统印模的整个制作过程包括托盘选择、材料混合、装载、托盘放置和取出等多个阶段,随着传统印模的发展,这一过程已被排除,而收集智能印模的操作要快得多,也简单得多。因此,为了更多地了解数字印模,我们选择了这种技术。我们考虑了数字化印模技术与传统印模的优缺点。修复牙科中数字化印模的可靠性由许多因素决定。修复牙科中数字印模的准确性可能受到植入物的深度/角度、操作者的技能、使用的口内扫描仪和环境因素的影响。本研究的目的是了解哪些因素会影响修复牙科中数字印模的可靠性。在牙科中,口内扫描仪 (IOS) 用于捕捉光学传输印模。3D 技术的进步以及 IOS 在牙科诊所的日益普及,要求对完整性进行审查

灵活且针对具体情境的 AI 可解释性
摘要 近年来人们对人工智能 (AI) 的热情主要归功于深度学习的进步。深度学习方法非常准确,但也不太透明,这限制了它们在安全关键型应用中的潜在应用。为了获得信任和问责,机器学习算法的设计者和操作者必须能够向用户、监管者和公民解释算法的内部工作原理、结果以及失败的原因。本文的独创性在于结合可解释性的技术、法律和经济方面,开发一个框架来定义给定环境下可解释性的“正确”水平。我们提出了三个逻辑步骤:首先,定义主要的背景因素,例如解释的受众是谁、操作背景、系统可能造成的危害程度以及法律/监管框架。此步骤将有助于描述解释的操作和法律需求,以及相应的社会效益。第二步,检查可用的技术工具,包括事后方法(输入扰动、显著性图……)和混合 AI 方法。第三步,根据前两个步骤,选择正确的全局和局部解释输出级别,同时考虑所涉及的成本。我们确定了七种成本,并强调只有当总社会效益超过成本时,解释才具有社会意义。
灵活且针对特定情境的 AI 可解释性
摘要 近年来人们对人工智能 (AI) 的热情主要归功于深度学习的进步。深度学习方法非常准确,但也不够透明,这限制了它们在安全关键应用中的潜在用途。为了获得信任和问责,机器学习算法的设计者和操作者必须能够向用户、监管者和公民解释算法的内部工作原理、结果和失败的原因。本文的独创性在于结合可解释性的技术、法律和经济方面,开发一个框架来定义给定上下文中“正确”的可解释性水平。我们提出了三个逻辑步骤:首先,定义主要的背景因素,例如解释的受众是谁、操作背景、系统可能造成的危害程度以及法律/监管框架。此步骤将有助于描述解释的操作和法律需求,以及相应的社会效益。第二,检查可用的技术工具,包括事后方法(输入扰动、显着图......)和混合AI方法。第三,作为前两个步骤的功能,选择正确的全局和局部解释输出级别,同时考虑所涉及的成本。我们确定了七种成本,并强调只有当总社会效益超过成本时,解释才具有社会用途。

灵活且针对具体情境的 AI 可解释性
摘要 近年来人们对人工智能 (AI) 的热情主要归功于深度学习的进步。深度学习方法非常准确,但也不太透明,这限制了它们在安全关键型应用中的潜在应用。为了获得信任和问责,机器学习算法的设计者和操作者必须能够向用户、监管者和公民解释算法的内部工作原理、结果以及失败的原因。本文的独创性在于结合可解释性的技术、法律和经济方面,开发一个框架来定义给定环境下可解释性的“正确”水平。我们提出了三个逻辑步骤:首先,定义主要的背景因素,例如解释的受众是谁、操作背景、系统可能造成的危害程度以及法律/监管框架。此步骤将有助于描述解释的操作和法律需求,以及相应的社会效益。第二步,检查可用的技术工具,包括事后方法(输入扰动、显著性图……)和混合 AI 方法。第三步,根据前两个步骤,选择正确的全局和局部解释输出级别,同时考虑所涉及的成本。我们确定了七种成本,并强调只有当总社会效益超过成本时,解释才具有社会意义。

一种低复杂度的脑机接口,用于高...
脑机接口 (BCI) 是一种允许人类操作者仅使用心理命令来控制与周围世界交互的末端执行器的系统 [1]。该系统由一个测量设备组成,用于记录人类用户的大脑活动,然后将其处理为驱动系统末端执行器的命令。BCI 涉及两种测量方式:一种是侵入式测量,这种测量允许高复杂度控制,但通常不可行;另一种是非侵入式测量,这种测量提供的信号质量较低,但更实用。一般来说,尚未开发出既能高效、稳健、可扩展地执行高复杂度控制,又能保留非侵入式测量实用性的 BCI 系统。在这里,我们利用反馈信息理论的最新成果 [2、3] 来填补这一空白,将 BCI 建模为一个通信系统,并部署一种人类可实现的交互算法,用于对高复杂度机器人群进行非侵入式控制。我们构建了一个可扩展的机器人行为词典,BCI 用户可以轻松高效地搜索该词典,正如我们通过大规模用户研究测试我们的交互算法的可行性、对(虚拟和真实)机器人群进行完整 BCI 系统的用户测试以及根据理论模型验证我们结果的模拟所证明的那样。我们的结果提供了一个概念证明,即如何通过具有低复杂度和噪声输入的 BCI 系统有效地控制一大类高复杂度效应器(甚至超出机器人技术)。