XiaoMi-AI文件搜索系统
World File Search System时钟周期
量子点细胞自动机(QCA)中的一种新型单层全加器
而列数是垂直方向上的最大单元数。QCA Designer-E 会估算所有可能的坐标组合的总能量耗散。有各种能量耗散分量,如 E_bath、E_clk、E_io、E_in 和 E_out,用于计算所有坐标的总能量耗散。QCA 单元在时钟周期内会损失能量。该能量耗散显示为 E_bath [13]。需要注意的是,E_in 和 E_out 是 QCA 单元的输入和输出能量耗散,而 E_io 是 E_out 和 E_in 之间的能量耗散差。能量耗散为正值表示能量转移到 E_clk、E_io 和 E_env,其中 E_env 是转移到环境中的能量。能量耗散误差 (E_Error) 计算为 EError = Eenv-
AI 引擎内核编码最佳实践指南
虽然大多数标准 C 代码都可以为 AI 引擎编译,但代码可能需要重构才能充分利用硬件提供的并行性。AI 引擎的强大之处在于它能够使用两个向量执行乘法累加 (MAC) 运算、为下一个运算加载两个向量、存储上一个运算的向量以及在每个时钟周期增加指针或执行另一个标量运算。称为内在函数的专用函数允许您定位 AI 引擎向量和标量处理器并提供几个常见向量和标量函数的实现,因此您可以专注于目标算法。除了向量单元之外,AI 引擎还包括一个标量单元,可用于非线性函数和数据类型转换。
TB318:NCO 作为稳定、精确的合成器 - 瑞萨电子
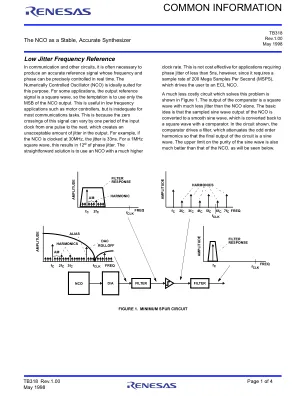
在通信和其他电路中,通常需要产生一个精确的参考信号,其频率和相位可以实时精确控制。数控振荡器 (NCO) 非常适合此目的。对于某些应用,输出参考信号是方波,因此倾向于仅使用 NCO 输出的 MSB。这在电机控制器等低频应用中很有用,但对于大多数通信任务而言是不够的。这是因为该信号的零交叉可以在一个脉冲与下一个脉冲之间相差一个输入时钟周期,这会在输出中产生不可接受的抖动量。例如,如果 NCO 的时钟频率为 30MHz,则抖动为 33ns。对于 1MHz 方波,这会导致 12 o 的相位抖动。最直接的解决方案是使用 NCO,其性能要高得多

使用动态密钥解锁混淆的扫描链
摘要 — 半导体行业的外包为更快、更经济的芯片制造开辟了道路。然而,这也引入了恶意的不受信任的实体,他们窃取知识产权 (IP)、过度生产电路、插入硬件木马或伪造芯片。最近,提出了一种防御措施,基于动态密钥来混淆扫描访问,该密钥最初由密钥生成,但每个时钟周期都会发生变化。这种防御可以被认为是所有扫描锁定技术中最严格的防御。在本文中,我们提出了一种攻击,将这种防御改造成一种可以被 SAT 攻击破解的攻击,同时我们还注意到,我们的攻击可以调整为破解其他不太严格(密钥更新频率较低)的扫描锁定技术。

126 图片微控制器
从数据手册中给出的框图中可以得出一个稍微简化的内部架构(图 10)。Microchip 在其微控制器中采用的这种架构的特点是代码和数据存储器之间的独立性。因此,每个存储器的容量和总线大小都严格适应设计需求,便于两个存储器并行工作,从而获得高性能。RISC 理念体现在其指令库的少量指令中。它仅包含 35 条指令,这些指令在一个指令周期内执行,相当于四个时钟周期,但跳转指令除外,这些指令需要两个周期。

TPS62040 TPS62042,TPS62043 TPS62044,TPS62046
在PWM操作过程中,转换器使用唯一的快速响应电压模式控制器方案,并使用输入电压馈电 - for -for -for -for -For -For -For -For -For -Forne for -Fore and Load Condulation,从而允许使用小的陶瓷输入和输出电容器。在每个时钟周期开始时,时钟信号启动的时钟循环(s)p通道MOSFET开关打开,电感器电流逐渐升起,直到比较器行程和控制逻辑关闭开关。当前限制比较器还关闭开关,以防超过P通道开关的当前限制。在防止电流射击的时间后,N通道MOSFET整流器被打开,电感器电流升至下降。下一个周期是由时钟信号启动的,再次关闭N通道整流器并打开P通道开关。

片上尖峰分类,有效的中位数...
摘要 - 我们提出了Lenzen,Fuegger,Kinali和Wiederhake的电压下垂校正电路的基于闩锁的无PLL设计[1]。这样的电路会动态修改VLSI系统的数字时钟的时钟频率。我们的电路在两个时钟周期内做出响应,并将同步器链的长度减半,而同步链的长度与先前的设计相比。此外,我们引入了一种基于差异传感器的设计,用于掩盖闩锁,以替代[1]所需的设计,但仍未指定。使用闩锁而不是阈值改变的触发器改变了我们设计的时序特性,因此伴随其设计伴随的正确性证明了我们在此处提出的修改。该设计已成功实施,在IHP 130 nm过程技术上。实验测量结果将在随后的出版物中讨论。

TSL214 64 × 1 集成光电传感器
输出周期由与时钟上升沿同时出现的 SI 脉冲启动(图 1 和图 2)。输出电压对应于稳定时间 (t s ) 后第一个像素的电平,并在有效时间 (t v ) 内保持不变。时钟的每个上升沿都提供与每个后续像素相对应的电压。输出周期在第 65 个时钟周期的上升沿结束,此时输出呈现高阻抗状态。第 65 个时钟周期终止最后一个像素的输出并清除移位寄存器以准备下一个 SI 脉冲。为了实现最短的积分时间,SI 脉冲可以出现在时钟的第 66 个上升沿,以立即重新启动输出阶段。一旦输出周期由 SI 脉冲启动,就必须允许时钟完成 65 个正向转换,以便将内部逻辑重置为已知状态。

HXRHPPC处理器RAD硬处理器
微处理器描述HXRHPPC处理器集成了五个执行单元 - 一个整数单元(IU),浮点单元(FPU),分支处理单元(BPU),负载/存储单元(LSU)和系统寄存器单元(SRU)。并行执行五个指令的能力以及使用快速执行时间的简单指令产生高系统效率和吞吐量。大多数整数指令具有一个时钟周期的吞吐量。FPU是管道的,因此可以在每个时钟周期中发出单精确的多重ADD指令。处理器提供独立的片上,16个kbyte,四向设置缔合性,物理上的caches,用于指令和数据以及芯片指令和数据存储器管理单位(MMU)。它还通过使用两个独立指令和数据块地址

补充信息:使用直接调制激光器的千兆赫测量设备独立的量子密钥分发
为了满足诱饵态 MDI-QKD 的安全性证明,重要的是弱相干态之间的相位随机化。我们的装置本质上是通过增益切换主激光器的性质实现这一点的:通过在每个时钟周期内定期将激光器驱动到阈值以下,持续足够的时间使激光腔中没有光子,每个脉冲都从自发辐射中增长 - 即由随机真空涨落有效地播种。通过将每个发射器中的未衰减脉冲串(每个脉冲的持续时间为 75 ps,如补充图 1a 所示)通过非对称马赫-曾德尔干涉仪 (AMZI) 来确认这一点,其中一条臂延迟以干扰连续的相干态。在光电二极管和示波器上测量输出强度,然后进行处理以形成 10 5 个脉冲中心的输出强度直方图。直方图(补充图 1b)展示了均匀分布的随机相对相位 φ 的脉冲干涉预期呈现 1 + cos(φ) 形状,其中考虑了实验的不确定性[1]。