XiaoMi-AI文件搜索系统
World File Search System有风的
Ynni Celyn 储能:发表您的意见
随着我们开始更多地使用风能和太阳能,电池储存是确保我们国家拥有清洁、安全和负担得起的能源的重要组成部分。这些能源不能持续发电,但电池可以让我们储存电力并在最需要的时候释放。这意味着家庭和企业可以继续供电——即使在没有阳光或没有风的时候。

Vantage智能安装手册
1。可以增加电池容量的时间更长。2。可以运行太阳能供应,请咨询您的经销商以寻求帮助。3。假设在没有风的水平门上使用了全部操作员。4。每个操作员都带有独特的键。5。基于25°C的环境温度和不在阳光直射的单位。6。基于级别量不到50%的操作员推力。7。基于双套件,不包括红外安全光束。8。单套件包含一个操作员和墙盒。9。双套件包含两个操作员和一个墙盒。
红树林生态系统的碳库存和角色蓝色经济在Pangandaran West Java
摘要。风驱动的呼吸机(例如屋顶呼鸟鸟)纯粹依靠风和热膨胀来操作。因此,在没有风的情况下,它们无法有效地发挥作用。此外,他们只有在屋顶空间积聚的热量时才开始通风,这表明屋顶的潜在问题变得过热。因此,可以有效解决热问题的替代通风系统至关重要。在这方面,据报道,太阳能通风系统被报告为可行的解决方案。该发达的系统根据天花板的温度条件运行,在炎热的天气下,风扇在达到一定的凉爽温度后会减慢或停止。这种温度控制的特性将其与以恒定速度运行的其他太阳能通风系统区分开。通过持续的研究和改进,可以预期这种新的温度控制通风系统具有良好的商业化潜力。
我们的咨询活动 - Eccles 电池储能系统
BESS 技术在支持推广更多可再生能源发电和实现我们的净零排放目标方面发挥着关键作用。到 2030 年及以后,大量额外的海上风电场发电将接入苏格兰电网。由于风电场发电的间歇性,苏格兰有时会生产出超过需求所需的电力,而有时又生产不足。通过储存这些多余的能源,BESS 可以帮助确保家庭和企业即使在没有阳光或没有风的时候也能使用太阳能和风能等可再生能源供电。通过管理这些高峰和低谷,电池存储系统提供了一种控制和维持可靠、安全和可持续能源供应的方法。
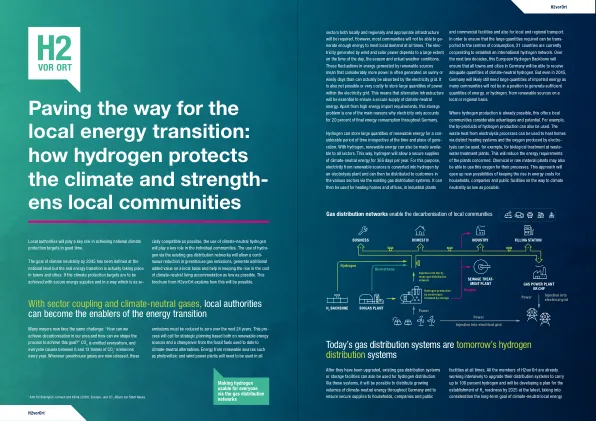
为当地能源转型铺平道路
需要适当的基础设施。然而,大多数社区无法始终产生足够的能源来满足当地需求。风能和太阳能发电在很大程度上取决于一天中的时间、季节和实际天气条件。可再生能源产生的能源的这些波动意味着,晴天或有风的日子产生的电力通常比电网实际能够吸收的电力多得多。在电网内储存大量电力也是不可能或成本太高。这意味着替代基础设施对于确保气候中性能源的安全供应至关重要。除了高能源进口要求外,这个储存问题也是电力仅占整个德国最终能源消费20%的主要原因之一。

第一单元 化石燃料和替代能源
风能是一种环保而高效的可再生能源。它不需要经常性开支来生产电力。但是利用风能有很多限制。首先,风力发电场只能建立在一年中大部分时间都有风的地方。风速还应高于 15 公里/小时,以保持涡轮机所需的速度。此外,还应有一些备用设施(如蓄电池)来满足无风时期的能源需求。建立风力发电场需要大面积的土地。对于 1 兆瓦发电机,发电场需要大约 2 公顷的土地。建立发电场的初始成本相当高。此外,由于塔架和叶片会受到雨水、阳光、风暴和飓风等自然变化的影响,因此需要高水平的维护。

用于飞机轨迹跟踪的不完全状态观测系统辨识和 LQR 控制器设计
摘要:本文介绍了一种在并非所有状态都可用的情况下针对飞机跟踪问题的控制器设计流程。在研究中,采用了非线性运输飞机仿真模型,并通过最大似然原理和扩展卡尔曼滤波器对其进行了识别。在并非所有状态都可测量的情况下,所获得的数学模型用于设计具有最佳加权矩阵的线性二次调节器 (LQR)。对具有 LQR 控制器跟踪能力的非线性飞机仿真模型进行了多次实验,实验中噪声水平各不相同。结果表明,所设计的控制器具有鲁棒性,可实现精确的轨迹跟踪。研究发现,在理想的大气条件下,即使对于未测量的变量,跟踪误差也很小。在有风的情况下,跟踪误差与风速成正比,对于小扰动和中等扰动而言是可以接受的。当实验中存在湍流时,会发生与湍流强度成正比的状态变量振荡,对于小扰动和中等扰动而言是可以接受的。
用于飞机轨迹跟踪的不完全状态观测的系统识别和 LQR 控制器设计
摘要:本文介绍了一种当并非所有状态都可用时,针对飞机跟踪问题的控制器设计流程。在研究中,采用了非线性运输飞机仿真模型,并通过最大似然原理和扩展卡尔曼滤波器对其进行了识别。在并非所有状态都可测量的情况下,所获得的数学模型用于设计具有最佳加权矩阵的线性二次调节器 (LQR)。对具有 LQR 控制器跟踪能力的非线性飞机仿真模型进行了多次实验,实验中噪声水平各不相同。结果表明,所设计的控制器具有鲁棒性,可实现精确的轨迹跟踪。研究发现,在理想的大气条件下,即使对于未测量的变量,跟踪误差也很小。在有风的情况下,跟踪误差与风速成正比,对于小扰动和中等扰动而言是可以接受的。当实验中存在湍流时,会发生与湍流强度成正比的状态变量振荡,对于小扰动和中等扰动而言是可以接受的。
用于飞机轨迹跟踪的不完全状态观测系统辨识和 LQR 控制器设计
摘要:本文介绍了一种在并非所有状态都可用的情况下针对飞机跟踪问题的控制器设计流程。在研究中,采用了非线性运输飞机仿真模型,并通过最大似然原理和扩展卡尔曼滤波器对其进行了识别。在并非所有状态都可测量的情况下,所获得的数学模型用于设计具有最佳加权矩阵的线性二次调节器 (LQR)。对具有 LQR 控制器跟踪能力的非线性飞机仿真模型进行了多次实验,实验中噪声水平各不相同。结果表明,所设计的控制器具有鲁棒性,可实现精确的轨迹跟踪。研究发现,在理想的大气条件下,即使对于未测量的变量,跟踪误差也很小。在有风的情况下,跟踪误差与风速成正比,对于小扰动和中等扰动而言是可以接受的。当实验中存在湍流时,会发生与湍流强度成正比的状态变量振荡,对于小扰动和中等扰动而言是可以接受的。
用于飞机轨迹跟踪的不完全状态观测系统辨识和 LQR 控制器设计
摘要:本文介绍了一种在并非所有状态都可用的情况下针对飞机跟踪问题的控制器设计流程。在研究中,采用了非线性运输飞机仿真模型,并通过最大似然原理和扩展卡尔曼滤波器对其进行了识别。在并非所有状态都可测量的情况下,所获得的数学模型用于设计具有最佳加权矩阵的线性二次调节器 (LQR)。对具有 LQR 控制器跟踪能力的非线性飞机仿真模型进行了多次实验,实验中噪声水平各不相同。结果表明,所设计的控制器具有鲁棒性,可实现精确的轨迹跟踪。研究发现,在理想的大气条件下,即使对于未测量的变量,跟踪误差也很小。在有风的情况下,跟踪误差与风速成正比,对于小扰动和中等扰动而言是可以接受的。当实验中存在湍流时,会发生与湍流强度成正比的状态变量振荡,对于小扰动和中等扰动而言是可以接受的。