XiaoMi-AI文件搜索系统
World File Search System机械效率

外围神经再生的脚手架设计注意事项
摘要外周神经损伤(PNI)代表了严重的临床和公共卫生问题,因为它的自发恢复较差,自发恢复不良。与自体移植相比,自体移植仍然是诊所中长距离周围神经缺陷的最佳实践,使用基于聚合物的生物降解神经引导导管(NGC)的使用一直在获得动量,替代了指导严重PNI的维修而无需进行次级手术和供体培训和供体的养蜂组织。然而,简单的空心圆柱管几乎不能超过再生效率的自体移植,尤其是在关键尺寸的PNI中。随着组织工程技术和材料科学的快速发展,在过去几十年中,已经出现了各种功能化的NGC来增强神经再生。从脚手架设计方面的方面,特别关注可生物降解的聚合物,本综述旨在通过解决生物材料选择,结构性设计和制造技术的繁重需求来总结NGC的最新进展,从而对生物兼容,范围造成的范围,机械效率和机械效率,工业效率,机械效率,工业效率,工业效率,工业效率,机械效率,机械效率,机械效率,机械效率,机械效率,机械效率,机械效率,机械效率,释放,效益,机械效率,机械效率,释放效率,工业效率,工业效率,既定效率NGC的神经再生潜力。此外,比较并讨论了几种市售的NGC及其调节途径和临床应用。最后,我们讨论了当前的挑战和未来的方向,试图为理想的NGC的未来设计提供灵感,这些设计可以完全治愈长距离外围神经缺陷。
美国农业部 REAP 的小型水电能源
水力发电潜力 • 水头 - 进水口和涡轮机之间的高度距离(英尺) • 流量 - 水量(cfs) • 水力效率 - 主要由压力水管的大小和类型决定 • 涡轮机的机械效率 • 电机的电气效率
洁净室 HEPA 过滤器
Ahlstrom-Munksjö Glass 高效空气 Glass 高效空气产品涵盖了符合 EN1822 标准的从 E10 到 U17 的各种全机械效率介质,以及基于 MIL-STD-282 测试方法的美洲补充系列。产品组合的特点是低压降和高容尘量,以及卓越的介质均匀性,可确保在过滤器使用寿命期间获得最佳过滤性能。刚度和机械阻力经过优化,可在过滤器制造过程中提高生产率;是深褶和微褶应用的绝佳选择

自动实现和评估错误...
摘要 - 量子机械效率的脆弱性,实际量子计算机受到频繁噪声效应的困扰,这些噪声效应在计算过程中引起错误。量子错误校正代码通过提供识别和纠正相应错误的手段来解决此问题。但是,关于量子误差校正的大多数研究都是理论上的或仅针对特定硬件模型进行了评估。此外,相应的代码的开发以及它们是否确实解决了特定硬件模型的问题,迄今为止仍然依靠乏味的反复试验。在这项工作中,我们提出了一个开源框架,该框架通过为给定的应用程序自动介绍错误校正校正代码,然后进行自动噪声引用的量子电路模拟,从而支持工程师和研究人员。案例研究表明,这允许对错误校正代码进行更有效的实施和评估。

分层的van der waals crcl 3
我们研究了范德华(VDW)分层CRCL 3的磁性和磁性性能,并通过磁化和热容量测量值进行了磁性和磁性特性。crcl 3由于铁磁和防铁磁相互作用之间的强烈竞争而表现出复杂的磁性特性:一种约17 k的铁磁秩序,然后在14.3 k处进行防铁磁有序。在14.3 K.观察到在过渡温度附近7 t的场变化,而在18 K和0-3 T处的机械效率(G M)为1.17。磁电参数的这些值比CRI 3和其他分层VDW系统的值明显大。缩放分析表明,所有重新缩放的D S M(T,H)数据崩溃成单个曲线,这表明磁相变的二阶性质。上面的结果表明,环保的CRCL 3可以是非常昂贵的稀土材料的绝佳选择,用于用于液化液化的磁性冷藏。
基于机械能量消耗的舒适度评估...
手势作为一种先进的交互方式,在人机交互中得到了广泛的应用。本文提出了一种基于机械能量消耗(MEE)和机械效率(ME)的舒适度评价模型来预测手势的舒适度。该舒适度评价模型基于肌肉和关节的数据,考虑了19块肌肉和7个自由度,能够模拟静态和动态手势的MEE和ME。因此,可以通过对MEE和ME进行归一化并赋予不同的决策权重来计算舒适度分数(CS)。与传统的基于测量的舒适度预测方法相比,一方面,该舒适度评价模型可以在不使用肌电图(EMG)或其他测量设备的情况下为手势的舒适度提供量化值;另一方面,从人机工程学的角度来看,结果提供了一个直观的指标来预测哪种动作对关节和肌肉来说更具有疲劳或损伤的风险。通过实验验证了所提模型的有效性。将本文提出的舒适度评价模型与基于运动范围(ROM)的模型以及基于运动和手势评估方法(MMGA)的模型进行比较,发现由于忽略了运动过程中的动态手势和相对运动学特性,模型的预测结果略有不同。

虚拟现实的集成热触觉刺激系统
皮肤中受体产生的热和接触感觉对于对物理环境的感知至关重要,在人际关系中具有特别有力的作用。以可编程方式复制这些感觉的技术的进步不仅具有增强虚拟/增强现实环境的潜力,而且还对具有截肢或感官功能受损的人的医疗应用有望。工程挑战是在与精确的空间分辨率,功率 - 有效的操作,动态范围广泛的范围和快速的时间响应中相互互动,并在热调节中都具有快速的时间响应,形式可以延伸到身体的大区域。本文引入了无线,皮肤 - 兼容的热触觉调节界面,旨在解决这些挑战中的某些挑战,并具有提供可编程的增强振动位移和高速热刺激的可编程模式。实验和计算研究量化了在热触觉刺激器中垂直堆叠的设计布局的热和机械效率,这些布局也支持真实的时间,封闭 - 环路控制机制。该平台可有效地通过皮肤传达热和物理信息,如机器人假肢的控制以及与压力/温度敏感的触摸显示器的相互作用所证明的那样。

通过IFNγ诱导的NRF2还原加剧的神经毒性小胶质细胞激活
皮肤中受体产生的热和接触感觉对于对物理环境的感知至关重要,在人际关系中具有特别有力的作用。以可编程方式复制这些感觉的技术的进步不仅具有增强虚拟/增强现实环境的潜力,而且还对具有截肢或感官功能受损的人的医疗应用有望。工程挑战是在与精确的空间分辨率,功率 - 有效的操作,动态范围广泛的范围和快速的时间响应中相互互动,并在热调节中都具有快速的时间响应,形式可以延伸到身体的大区域。本文引入了无线,皮肤 - 兼容的热触觉调节界面,旨在解决这些挑战中的某些挑战,并具有提供可编程的增强振动位移和高速热刺激的可编程模式。实验和计算研究量化了在热触觉刺激器中垂直堆叠的设计布局的热和机械效率,这些布局也支持真实的时间,封闭 - 环路控制机制。该平台可有效地通过皮肤传达热和物理信息,如机器人假肢的控制以及与压力/温度敏感的触摸显示器的相互作用所证明的那样。
明尼苏达州家庭能源消耗的驱动因素。......
Lawrence A. Baker (PI) 生物产品和生物系统工程系;Jay Coggins (联合 PI) 和 David Bael 应用经济学系 Kristen Nelson (联合 PI) 森林资源系和渔业、野生动物和保护生物学系 引言 近期,减少化石燃料使用的大部分努力都集中在开发可再生能源上。尽管可再生能源现在提供了明尼苏达州 18% 的电力,但可再生能源仅占我们总能源消耗(包括旅行、供暖等燃料)的 3.7%(美国能源信息署 2014 年)。可再生能源对发电的贡献将继续增加,但可再生能源为旅行和空间供暖提供大量能源的潜力有限。我们还尝试通过提高机械效率来减少能源使用。在过去的 40 年里,几乎所有的东西都变得更加节能:汽车、家庭供暖和空调、飞机等。在同一时期,出现了一种相反的趋势:几乎所有东西的消费都在增加,包括房屋大小、空调使用、行驶里程、飞行里程,甚至卡路里的消耗(表 1)。表 1. 美国几种消费行为的趋势。1970 1980 1990 2000 2010 新建单户住宅平均面积,平方英尺
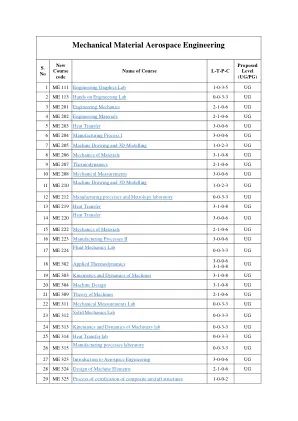
机械材料航空航天工程
模块 5:虚功和能量法- 虚位移、质点虚功原理和理想刚体系统、自由度。主动力图、有摩擦系统、机械效率。保守力和势能(弹性和重力)、平衡能量方程。能量法在平衡中的应用。平衡稳定性。模块 6:粒子动力学- 粒子运动学:直线运动、平面曲线运动 - 直角坐标、法向和切向坐标、极坐标、空间曲线 - 圆柱、球面(坐标)、相对运动和约束运动。粒子动力学:力、质量和加速度 - 直线和曲线运动、功和能量、冲量和动量 - 线性和角向;冲击 - 直接和斜向。粒子系统动力学:广义牛顿第二定律、功、冲量、能量和动量守恒定律 模块 7:刚体动力学简介 平面刚体运动学:刚体绕固定轴旋转的方程、一般平面运动、平面运动中的瞬时旋转中心、粒子相对于旋转框架的平面运动。科里奥利加速度平面刚体动力学:刚体运动方程、平面运动中刚体的角动量、刚体的平面运动和达朗贝尔原理、刚体系统、受限平面运动;作用于刚体上的力的能量和功、平面运动中刚体的动能、刚体系统、能量守恒、刚体的平面运动 - 冲量和动量、刚体系统、角动量守恒。