XiaoMi-AI文件搜索系统
World File Search System标准配备

配备了机器的设置'台上的实验室...
工业赞助的博士学位:配备机器学习(ML)作为公式设计和验证的高吞吐量(HTP)的“长凳上的实验室(LOB)”设置。伯明翰大学化学工程学院教授与配方工程CDT CRODA税收助学金,每年20,000英镑,还支付了费用。项目描述:大多数化学产品由多种配制的化合物组成,其中开发过程是迭代,费力和复杂的。配制的产品行业为英国经济的总增值贡献了超过1.49亿英镑,需要创新方法来加速创新速度并增强相应的可持续性概况。该项目的目的是开发一种与机器学习算法集成的高度创新的“实验室(LOB)”设置,作为用于筛选和开发在广泛应用程序中使用的配方产品的高吞吐量方法。该项目具有以下目标:i)进一步开发LOB设置,该设置结合了微流体和微型特征技术; ii)验证LOB方法的准确性和效率; iii)将ML算法与LOB操作集成在一起,形成封闭的反馈回路; iv)在研究具有高吞吐量效率的一系列配方产品时应用LOB设置。知识将用于指导新配制产品的开发。他们将开发可转让技能的组合,例如项目管理,沟通和团队工作,这确保了项目完成后的出色就业能力。与工业合作伙伴Croda紧密合作,博士候选人将在胶体和界面科学,计算机科学和仪器方面发展广泛的技能,并建立了对配方工程的广泛认识。如果您具有化学,物理或化学工程的背景,并且对可持续性和仪器充满热情,那么这是一个绝佳的机会。资金详细信息:符合EPSRC资金候选人的资格必须在工程或科学学科或2(2)加MSC中至少具有2(1)。要申请,请通过电子邮件将您的简历发送至CDT-Formulation@contacts.bham.ac.uk。仅由于资金限制而向英国国民开放。截止日期:2025年3月21日
配备自动门的先进 ATM 安全系统......
1,2,3,4,5 Annamacharya 理工学院,拉贾姆佩特,安得拉邦,印度。摘要:自动柜员机可用于多种用途,最显著的是现金提取。ATM 客户将进行数十亿笔交易并使用广泛的服务。同时,由于安全性较差,ATM 的抢劫案数量也很大。因此,有必要提出可以解决此问题的新技术。我们研究的主要目标是减少 ATM 抢劫案的数量。这里使用 MEMS 传感器来检测每次发生抢劫时 ATM 位置的变化。ATM 的振动传感器检测振动并启动适当的操作。一旦检测到振动和/或位置变化,Arduino 处理器就会收到信息。随后,使用直流电机关闭 ATM 室门,并启动继电器将气体排放到 ATM 中,使窃贼失去知觉。将使用 ESP Cam 拍摄事件照片,并启动第二个继电器自动锁定 ATM 门。GSM 模块将消息与 OTP 一起发送给相关银行当局和附近的警察局。最后,蜂鸣器会发出警报。要解锁 ATM 门,请使用门上的键盘输入 OTP;OTP 将显示在 LCD 上。由于此系统,ATM 系统无需警卫即可得到保护,这也使抓捕小偷变得容易。关键词:自动柜员机、抢劫检测、GSM 通知、电磁锁、安全措施。

配备频闪灯的小型无人机系统 (sUAS) 的飞行员视觉检测
在按照目视飞行规则飞行时,飞行员主要依靠视觉扫描来避开其他飞机和空中碰撞威胁。联邦航空管理局的记录表明,与无人机的近距离接触正在增加,2016 年报告的无人机系统 (UAS) 目击或近距离碰撞达到 1,761 起。这项研究旨在评估飞行员目视检测配备频闪灯的 UAS 平台的有效性。10 名飞行员组成的样本驾驶通用航空飞机,对配备频闪灯的小型 UAS (sUAS) 进行五次拦截。参与者被要求指出他们何时目视发现无人机。比较飞机和 sUAS 平台的地理位置信息以评估能见距离。研究结果用于评估日间频闪灯作为一种增强飞行员 sUAS 检测、能见度和防撞能力的方法的有效性。参与者在 7.7% 的拦截中发现了无人机。由于缺乏数据点,作者无法确定频闪灯是否能改善 UAS 视觉检测。作者建议进一步研究使用 sUAS 安装的频闪灯进行夜间视觉检测的有效性。
圣迈克尔医院护士配备计划
(每单位服务小时数) 34 白天 (0700-1930) 12.00 8.00 0.00 4.00 0.00 2.82 0.00 1.41 0.00 夜间 (1900-0730) 12.00 7.00 0.00 4.00 0.00 2.47 0.00 1.41 0.00 傍晚 (1400-2030) 6.00 1.00 0.00 0.00 0.00 0.18 0.00 0.00 0.00 33 白天 (0700-1930) 12.00 8.00 0.00 4.00 0.00 2.91 0.00 1.45 0.00夜间 (1900-0730) 12.00 7.00 0.00 3.00 0.00 2.55 0.00 1.09 0.00 夜间 (1400-2030) 6.00 1.00 0.00 0.00 0.00 0.18 0.00 0.00 0.00 32 白天 (0700-1930) 12.00 7.00 0.00 4.00 0.00 2.63 0.00 1.50 0.00 夜间 (1900-0730) 12.00 7.00 0.00 3.00 0.00 2.63 0.00 1.13 0.00 夜间(1400-2030) 6.00 1.00 0.00 0.00 0.00 0.19 0.00 0.00 0.00 31 白天 (0700-1930) 12.00 7.00 0.00 3.00 0.00 2.71 0.00 1.16 0.00 夜间 (1900-0730) 12.00 7.00 0.00 3.00 0.00 2.71 0.00 1.16 0.00 傍晚 (1400-2030) 6.00 1.00 0.00 0.00 0.00 0.19 0.00 0.00 0.00 30 白天(0700-1930) 12.00 7.00 0.00 3.00 0.00 2.80 0.00 1.20 0.00 夜间(1900-0730) 12.00 8.00 0.00 3.00 0.00 3.20 0.00 1.20 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 29 白天(0700-1930) 12.00 6.00 0.00 3.00 0.00 2.48 0.00 1.24 0.00 夜间(1900-0730) 12.00 6.00 0.00 3.00 0.00 2.48 0.00 1.24 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 28 白天 (0700-1930) 12.00 6.00 0.00 3.00 0.00 2.57 0.00 1.29 0.00 夜间 (1900-0730) 12.00 6.00 0.00 3.00 0.00 2.57 0.00 1.29 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 27 白天 (0700-1930) 12.00 6.00 0.00 3.00 0.00 2.67 0.00 1.33 0.00 夜间 (1900-0730) 12.00 6.00 0.00 3.00 0.00 2.67 0.00 1.33 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 26 白天 (0700-1930) 12.00 5.00 0.00 3.00 0.00 2.31 0.00 1.38 0.00 夜间 (1900-0730) 12.00 5.00 0.00 3.00 0.00 2.31 0.00 1.38 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 25 白天 (0700-1930) 12.00 5.00 0.00 3.00 0.00 2.40 0.00 1.44 0.00 夜间 (1900-0730) 12.00 5.00 0.00 3.00 0.00 2.40 0.00 1.44 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 24 白天 (0700-1930) 12.00 5.00 0.00 3.00 0.00 2.50 0.00 1.50 0.00 夜间 (1900-0730) 12.00 5.00 0.00 3.00 0.00 2.50 0.00 1.50 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 23 白天 (0700-1930) 12.00 5.00 0.00 3.00 0.00 2.61 0.00 1.57 0.00 夜间 (1900-0730) 12.00 5.00 0.00 3.00 0.00 2.61 0.00 1.57 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 22 白天 (0700-1930) 12.00 5.00 0.00 3.00 0.00 2.73 0.00 1.64 0.00 夜间 (1900-0730) 12.00 5.00 0.00 3.00 0.00 2.73 0.00 1.64 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 21 白天 (0700-1930) 12.00 4.00 0.00 3.00 0.00 2.29 0.00 1.71 0.00 夜间 (1900-0730) 12.00 4.00 0.00 2.00 0.00 2.29 0.00 1.14 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 20 白天 (0700-1930) 12.00 4.00 0.00 3.00 0.00 2.40 0.00 1.80 0.00 夜间(1900-0730) 12.00 4.00 0.00 2.00 0.00 2.40 0.00 1.20 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00

配备 AI 引擎的 Versal™ Premium 系列
本文所含信息仅供参考,如有更改,恕不另行通知。尽管在编写本文档时已采取一切预防措施,但其中可能包含技术上的不准确之处、遗漏之处和印刷错误,AMD 没有义务更新或以其他方式更正此信息。Advanced Micro Devices, Inc. 对本文档内容的准确性或完整性不作任何陈述或保证,并且不承担任何责任,包括对本文所述 AMD 硬件、软件或其他产品的操作或使用不侵权、适销性或适用性的默示保证。本文档不授予任何知识产权许可,包括默示许可或禁止反言许可。购买或使用 AMD 产品的条款和限制规定在双方签署的协议或 AMD 的标准销售条款和条件中。
IS&S 3010 NextGen 驾驶舱配备 ThrustSense
PC-12 NextGen 驾驶舱支持双飞行管理系统 (FMS)、电子图表、发动机数据集中器单元、自动油门象限组装套件(专利申请中)、集成待机单元 (ISU)、卫星气象、集成 TAWS 的合成视觉 (SVS)、用于前视红外雷达 (FLIR) 的可选增强视觉 (EVS)。与生产线上的最新一代飞机相比,该套件具有更大的显示区域和更多的显示像素。驾驶舱完全符合 NextGen 对所需导航性能 (RNP) 的要求。

配备测功仪来监测划船表现的可靠性
本研究的目的是开发一种便携式数据采集系统,用于测量模拟划船过程中每次划桨的功率输出和脚部产生的力量,并使用该系统研究用于描述划船表现的选定变量的可靠性。使用 Concept II 划船测力计,瞬时功率输出计算为手柄处的力量(使用安装在手柄附近的小型传感器测量)和手柄速度(使用红外发射器 - 接收器检测飞轮每个叶片的通过来测量)的乘积。使用两个测力板测量脚部的累积力,每个测力板安装在每只脚下。使用运行 Asyst 数据采集软件的 80386SX 计算机以 30 Hz 的频率对所有传感器的输出进行采样。所有传感器均具有出色的线性度,系统校准显示测量误差小于 3%。使用对七名经验丰富的桨手进行的重复 90 秒最大测试来研究用于描述划船表现的变量的可靠性。统计分析表明,在使用的 14 个变量中,只有两个变量不符合设定的标准。总之,发现划船者在模拟划船过程中的表现非常可靠,并且本研究中使用的选定变量可用于客观地描述划船测功仪上的表现。

为军队配备响应式采购技术……
识别潜在威胁 Athena 使军队能够快速提取和处理来自 GPS、卫星手机、电话和其他便携式设备的通信和定位信息。Athena 使军队能够获取证据并将潜在嫌疑人与事件、地点或事故联系起来,例如放置简易爆炸装置。
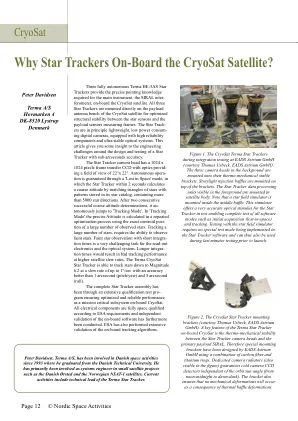
为何 CryoSat 卫星上配备星体追踪器?
1024 像素帧传输 CCD,光学元件提供 22°x 22° 的视野。通过“迷失太空”模式保证自主操作,在该模式下,星体跟踪器在 2 秒内通过将星星的三角形与存储在其星表中的图案进行匹配来计算粗略姿态,其中包含 5000 多个星星方向。连续两次成功确定粗略姿态后,它会自动跳转到“跟踪模式”。在“跟踪模式”下,使用大量观测恒星的精确质心位置,通过重复优化过程计算出精确的姿态。跟踪大量恒星需要能够观察暗淡的恒星。对于读出电子设备和光学系统来说,在短积分时间内观测暗星是一项非常具有挑战性的任务。较长的积分时间会导致卫星旋转速率较高时跟踪性能不佳。Terma CryoSat 星跟踪器能够以高达 1°/秒的旋转速率跟踪低至 6.2 等的恒星,精度优于 1 角秒(俯仰/偏航)和 5 角秒(滚动)。
配备推力矢量的脱轨固体火箭发动机...
PAWEŁ NOWAKOWSKI (IOA) ADAM OKNIŃSKI (IOA) ANNA KASZTANKIEWICZ (IOA) BŁAŻEJ MARCINIAK (IOA) DAMIAN KANIEWSKI (IOA) FILIP CZUBACZYŃSKI (IOA) JACEK MUSIAŁ (IOA) MICHAŁ RANACHOWSKI (IOA) WITOLD WĄSOWSKI (IOA) MACIEJ BORYS (ASTRONIKA)