XiaoMi-AI文件搜索系统
World File Search System梁式

在安静的太阳的3D模拟中加速粒子梁
上下文。观察性和理论证据表明,从X级浮游到纳米流动的太阳大气中,加速颗粒的光束都是在太阳大气中产生的各种大小的浮动事件。这些类型的颗粒的当前模型渗透循环假设一个孤立的1D气氛。目标。可以通过3D辐射磁水动力学代码提供对加速颗粒进行建模的更现实的环境。在这里,我们提出了一个简单的模型,用于粒子加速度和在安静太阳大气的3D模拟的背景下,从对流带到电晕。然后,我们检查粒子梁引入的能量的附加运输。方法。通过检测磁性拓扑的变化来识别与磁重新连接相关的粒子加速度的位置。在每个位置,从局部条件估算了加速粒子分布的参数。然后沿着磁场传播粒子分布,并计算出与环境等离子体的库仑碰撞引起的能量沉积。结果。我们发现,粒子梁源于分布在整个电晕上的扩展加速区。到达过渡区域后,它们会收敛并产生穿透色球的强烈加热链。在这些链中,光束加热始终在过渡区域底部以下主导导电加热。这表明粒子梁甚至在活动区域之外都会改变能量传输。

关于预制地铁站拱形梁的机械性能和轻巧设计的研究
根据预制的衬里组件的应用[8],在一系列国外已经应用了预制地铁站[9,10],而中国预制地铁站的技术仍处于早期阶段[11]。成功应用了Changchun Metro 2号线上5个站点的单个Arch大跨度完全预制的地铁站结构[12]。使用组装的积分结构构建了北京地铁线6 [13]西部延伸的Jin'Anqiao站[13]。驾驶站的标准部分是双层列三跨盒结构,在工厂中具有预制组件,并使用套筒灌浆方法连接了节点。Jinan Metro Line上的Yanmazhuang West Station的预制站[14]采用设计概念的设计概念,即结合预制和铸造成分,并采用将预制板与Cast-

旋转角动量和庞加莱矢量涡流梁的光学手性
摘要近年来对结构化标量涡流束的光学手性和自旋角动量进行了深入研究。这些梁的伪内拓扑电荷ℓ造成其独特特性的原因。是由带有拓扑电荷的标量涡流梁的叠加构建的,圆柱矢量涡流梁是具有空间上不均匀极化分布的高阶庞加尔模式。在这里,我们强调了这些高阶结构梁在偏尾(弱焦点)和非顺式(紧密的聚焦)条件下的光自旋和手性密度的高度可调节和异国情调的空间分布。我们的分析理论可以在任何高阶或杂种庞加莱球体上产生每个点的自旋角动量和光学手性。表明,可调的pancharatnam拓扑电荷ℓp =(ℓa +ℓb) / 2和偏振指数m =(vector涡流梁的vortex beam的ℓb - ℓa) / 2在自定义其旋转和chir式空间分布方面起着决定性的作用。我们还提供了正确的分析方程式,以描述集中的非顺式标量贝塞尔束。

手动托盘车(带电池秤)
4 天前 — 零件编号或规格。 TRUSCO。 THP-20-511SC-D。 或同等产品。 设备名称。 数量... 来自国防部部长官房卫生官、国防政策局局长、采购、技术和后勤局局长或陆上自卫队参谋长...

双刚度刚度梁的静态屈曲与自由振动分析...
本研究提出了二维功能梯度 (2D-FG) 金属陶瓷多孔梁静态屈曲和自由振动分析的解析解。为了实现这一目标,利用汉密尔顿原理推导出梁的运动方程,然后在 Galerkin 著名的方程解解析法框架内求解导出的方程。梁的材料属性随厚度和长度的变化而变化,符合幂律函数。在功能梯度材料 (FGM) 的制造过程中,可能会由于技术问题导致微孔出现而出现孔隙。本文给出了详细的数学推导并进行了数值研究,重点研究了各种参数(例如厚度和长度两个方向上的 FG 功率指数、孔隙率和细长比 (L/h))对基于新高变形梁理论的梁的无量纲频率和静态屈曲的影响。通过将结果与公认的研究进行比较,验证了所提出模型的准确性。根据屈曲和振动分析的结果,所提出的沿厚度方向的修改的横向剪应力与TBT相比表现出更接近的结果。

线性极化的Lorentz-Gauss梁具有异质分布的实验和理论研究
在实践中很难繁殖,因为它们需要以幅度和相项的调制,因此很难繁殖高斯光束。在此,计算了一种新的线性极化的Lorentz - 高斯光束,该束由螺旋隔离膜(LGB-HA)调制,并描述了该梁的两种各种实验生成方法,傅立叶变换方法(FTM)和复杂振幅调制(CAM)方法。与FTM相比,CAM方法只能通过一个反射型型相位液晶空间光调节器同时调节相位和幅度。这两种方法都与数值结果一致。CAM虽然更简单,更有效,并且通过数据比较具有更高程度的符合度。此外,考虑到具有异质分布的复杂Lorentz - 高斯光束中存在一些障碍,还实现了具有不同参数的梁的进化规律性(轴向参数,拓扑电荷和相位因子)。
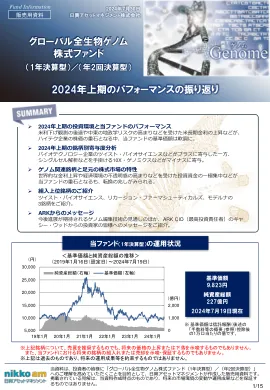
2024年上半年的全球全生物基因组股票基金...
自2022年初以来,高通货膨胀率已经蔓延到美国美联储(FED)迅速朝着标准化货币政策迈进,美国的长期利率再次上升,导致高科技股票的趋势较弱。然而,在2023年,高科技股票的股价在2024年6月急剧上涨,因为美国和欧洲对结束货币收紧的观察结果是逆风,并且随着AI一代的焦点,人们对AI的需求有所增加。同时,与基因组相关的股票在延迟方面值得注意。背后有两个可能的原因:
对旋式真空泵的非接触式遥测系统...
在“欧洲清洁天空”计划中,空中客车公司及其合作伙伴进行了一系列风洞测试,以实验方式研究 CROR 动力飞机在低速和 1/7 比例下在 T 型尾翼基线上的气动声学性能。为此,NLR 开发了一个广泛的仪器系统。该仪器系统需要对数百个声学和机械参数进行高度同步的测量。
非间隔式剥离式束带协议
8.5 Visit Descriptions ......................................................................................................................30 8.5.1 Visit 1 – Baseline (Study Week 0) ................................................................................................ 30 8.5.2 Visit 2 – Approximately 4 Weeks after Visit 1 (Study Week 4) ................................................... 31 8.5.3 Visit 3 – Approximately 12 Weeks after Visit 2 (Study Week 16) ............................................... 31 8.5.4 Visit 4 – Approximately 12 Weeks after Visit 3 (Study Week 28) ............................................... 31 8.5.5 Visit 5 – Approximately 12 Weeks after Visit 4 (Study Week 40) ............................................... 32 8.5.6 Visit 6 – Approximately 12 Weeks after Visit 5 (Study Week 52) ............................................... 32 8.5.7 Early终止访问................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... 32