XiaoMi-AI文件搜索系统
World File Search System步而
第 2 步 CK 备考指南 MD 2025 届
简介 当您开始认真备考 USMLE Step 2 临床知识 (CK) 考试时,选择正确的学习方法对您的成功至关重要。以下是资源和组织 Step 2 学习的方法。理想情况下,您应该在临床轮换期间尽早开始使用题库,但制定一个适合您且可在实习期间适应的计划并不总是那么简单,因为时间和精力可能有限。本简要指南旨在提供大纲、建议策略以及有关备考 Step 2 CK 的常见问题的解答。虽然您应该向他人寻求建议,但您比任何人都更了解自己。制定最适合您的学习计划。整体学生成功中心将为您提供帮助。本指南根据三个基本领域组织起来,以提高 Step 2 的表现:

ICH 指南 M10 生物分析方法验证第 5 步
7.1.1. 用于内源性分子分析物方法的质量控制样品......................................................................................................................................... 28


抗菌肽在癌症治疗中的应用——我们进展到了哪一步?
肿瘤疾病是现代社会面临的一大挑战。因此,近几十年来,科学家们开始寻找能够支持或独立用于肿瘤治疗的天然化合物。在抗菌蛋白 (AMP) 中,从 Hyalophora cecropia 蛹的免疫血淋巴中分离出一种很有前途的肽家族。天蚕素家族不仅具有抗菌和抗真菌特性,而且最重要的是还具有抗癌特性。它们的抗肿瘤潜力已通过对几种不同细胞系(其中包括前列腺癌细胞系和乳腺癌细胞系)进行的体外研究得到证实。本文介绍了一些出版物,这些出版物展示了天蚕素家族成员对肿瘤细胞的细胞溶解特性,以及引入序列修饰的合成天蚕素 B 和与修饰的促黄体激素释放激素 (LHRH) 结合的天蚕素 B。此外,还描述了天蚕素作用机制的三种模型。这些肽在肿瘤治疗中应用的益处和局限性也已得到证实。
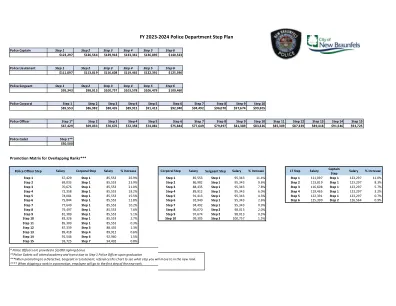
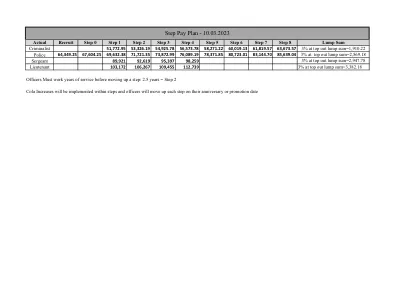
2023-2024 财年警察局分步计划
步骤 1 67,429 步骤 1 85,553 26.9% 步骤 1 85,553 步骤 1 95,343 11.4% 步骤 1 111,097 步骤 1 123,297 11.0% 步骤 2 69,033 步骤 1 85,553 23.9% 步骤 2 86,982 步骤 1 95,343 9.6% 步骤 2 113,819 步骤 1 123,297 8.3% 步骤 3 70,676 步骤 1 85,553 21.0% 步骤 3 88,435 步骤 1 95,343 7.8% 步骤 3 116,608 步骤 1 123,297 5.7% 步骤 4 72,358步骤 1 85,553 18.2% 步骤 4 89,912 步骤 1 95,343 6.0% 步骤 4 119,465 步骤 1 123,297 3.2% 步骤 5 74,081 步骤 1 85,553 15.5% 步骤 5 91,413 步骤 1 95,343 4.3% 步骤 5 122,391 步骤 1 123,297 0.7% 步骤 6 75,844 步骤 1 85,553 12.8% 步骤 6 92,940 步骤 1 95,343 2.6% 步骤 6 125,390 步骤 2 126,564 0.9% 步骤 7 77,649 步骤 1 85,553 10.2% 第 7 步 94,492 第 1 步 95,343 0.9% 第 8 步 79,497 第 1 步 85,553 7.6% 第 8 步 96,070 第 2 步 98,013 2.0% 第 9 步 81,389 第 1 步 85,553 5.1% 第 9 步 97,674 第 2 步 98,013 0.3% 第 10 步 83,326 第 1 步 85,553 2.7% 第 10 步 99,305 第 3 步 100,757 1.5% 第 11 步 85,309 第 1 步 85,553 0.3% 第 12 步 87,339 第 3 步 88,435 1.3% 第 13 步89,418 第 4 步 89,912 0.6% 第 14 步 91,546 第 6 步 92,940 1.5% 第 15 步 93,725 第 7 步 94,492 0.8%
2024 步骤计划.xlsx
实际招募 第 0 步 第 1 步 第 2 步 第 3 步 第 4 步 第 5 步 第 6 步 第 7 步 第 8 步 刑事侦查员 51,772.95 53,326.19 54,925.78 56,573.78 58,271.22 60,019.13 61,819.57 63,673.57 警察 64,349.25 67,604.25 69,632.38 71,721.35 73,872.99 76,089.19 78,371.85 80,723.01 83,144.70 85,639.04 警长 89,921 92,619 95,397 98,259中尉 103,172 106,267 109,455 112,739

带稳定性增强器的无尾飞行器增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模(IBS)控制器,用于无尾飞机的轨迹控制,该控制器具有未知干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种限制虚拟控制输入速率和幅度的稳定性增强器(SE)。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,将激活第一层 SE 来修改轨迹跟踪误差;当虚拟控制输入超出边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。在 SE 的帮助下,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数自适应估计器,与 IBS 相结合,使控制器表现出良好的鲁棒性。最后,给出了两个仿真。第一次仿真表明系统对外部干扰和模型不确定性不敏感,第二次仿真证明了 SE 的有效性。
基于反步滑模的共轴旋翼飞行器轨迹跟踪控制算法及试验
摘要:针对共轴旋翼飞行器自主飞行过程中模型参数的不确定性、外界扰动及传感器噪声对飞行的影响,研究位置姿态反馈控制系统的鲁棒反步滑模控制算法,以解决未知外界干扰情况下飞行器的轨迹跟踪问题。本文针对未知飞行,建立了基于受扰共轴旋翼飞行器的非线性动力学模型。然后,设计了非线性鲁棒反步滑模控制器,分为共轴旋翼飞行器的姿态控制器和位置控制器两个子控制器。在控制器中引入虚拟控制,构造Lyapunov函数,保证各子系统的稳定性。通过数值仿真验证了所提控制器的有效性。最后通过飞行试验验证了反步滑模控制算法的有效性。