XiaoMi-AI文件搜索系统
World File Search System水深测量

1918 年 10 月 11 日莫纳海峡海啸
摘要——波多黎各岛海岸最近一次观测到的海啸发生在 1918 年 10 月 11 日,当时莫纳海峡发生了 7.2 级地震。这场地震引发的海啸主要影响了该岛的西北部海岸。海啸后调查的上升值表明海浪高达 6 米。关于海啸源头的争议导致了几种数值模拟,其中断层破裂或海底滑坡是海啸的最可能原因。在这里,我们跟进了以前对地震引发的波多黎各西海岸海底滑坡海啸的模拟。我们以前研究的改进包括:(1)更高分辨率的水深测量;(2)专门为海啸开发的 3D-2D 耦合数值模型; (3) 使用具有双向嵌套功能的非静水力学数值模型 NEOWAVE (非静水力学海洋波演变);(4) 进行综合能量分析以确定海啸波完全发展的时间。三维 Navier-Stokes 模型海啸解采用 Navier-Stokes 算法,具有两种流体(水和滑坡)的多个界面,用于确定海底滑坡产生的初始波浪特性。使用 NEOWAVE 使我们能够解决沿海淹没、波浪传播和详细的爬高问题。我们的研究结果与以前的研究一致,其中海底滑坡被认为是海啸的最可能来源,并且水深测量分辨率的提高使沿海地区被淹没的情况与海啸后调查的值相吻合。我们独特的能量分析表明,大部分波浪能被隔离在波浪生成区域,特别是在滑坡附近的深度,并且一旦初始波浪从生成区域传播,其能量就会开始稳定。
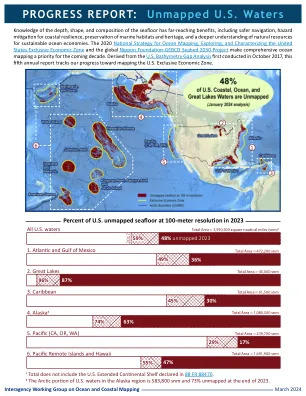
美国未绘制水域进度报告(2024 年 3 月)
了解海底的深度、形状和成分具有深远的益处,包括更安全的航行、降低危害以提高沿海复原力、保护海洋栖息地和遗产,以及更深入地了解可持续海洋经济的自然资源。2020 年美国专属经济区海洋测绘、探索和描述国家战略和全球日本基金会-GEBCO 海床 2030 项目将全面海洋测绘作为未来十年的优先事项。这份第五份年度报告源自 2017 年 10 月首次进行的美国水深测量差距分析,追踪了我们绘制美国专属经济区地图的进展。

西澳大利亚州开展的陆地、海洋和大气卫星遥感研究书目
地区。缺乏准确信息会导致问题得不到妥善管理。因此,西澳大利亚州政府需要获取有关陆地、水域、大气和沿海条件趋势的全面信息,以履行其环境责任。在陆地上,有证据表明,人们越来越多地使用卫星遥感来提供这些信息。在广阔的海洋上,有证据表明,海洋科学家利用卫星遥感进行水深测量、海洋栖息地测绘、河口水质、海洋环流和热结构,渔业也将其用于渔业作业。为了继续在西澳大利亚州深度风化的风化层下发现新的世界级矿床,人们继续开发新的航空地球物理和卫星遥感勘探技术。
雅芳河口潮间带地貌动力学
4.0 结果 4.1 横断面概况………………………………………………………………...68 4.1.1 圣克罗伊河变化描述…………………………………………………68 4.1.2 雅芳河变化描述…………………………………………………………..77 4.1.3 肯尼特库克河变化描述………………… ……………………………110 4.1.4 雅芳河下游横断面形态变化…………………………………………………115 4.1.5 潮汐棱柱体下游变化…………………………………………………………120 4.2 盐沼栖息地………………………………………………………………………………127 4.3 潮间带沉积特征……………………………………………………………………156 5.0 讨论…………………………………………………………………………………………160 6.0 结论…………………………………………………………………………………….165 参考文献………………………………………………………………………………………………169 附录 A:水深测量期间的潮汐和气象条件………………………………..176 附录 B:航空照片马赛克的飞行时间和相应的潮汐高度……………………………… 186
西澳大利亚州开展的陆地、海洋和大气卫星遥感研究书目
区域。缺乏准确的信息会导致问题管理不善。因此,西澳大利亚州政府需要获得有关陆地、水域、大气和沿海条件趋势的全面信息,以履行其环境责任。在陆地上,有证据表明,卫星遥感技术的应用越来越广泛,可以提供此类信息。在广阔的海洋上,有证据表明,海洋科学家利用卫星遥感技术进行水深测量、海洋栖息地测绘、河口水质、海洋环流和热结构,渔业也利用卫星遥感技术进行渔业作业。为了继续在西澳大利亚州风化程度深的风化层下发现新的世界级矿床,新的航空地球物理和卫星遥感勘探技术正在不断开发中。

项目 - 欧洲集群协作平台
得益于 AMOS 项目,一个嵌入创新系统的新型 USV 轻型平台诞生了。基于 SEMANTIC TS eBEEM 单波束声学系统和 GET 提供的空间数据基础设施,该系统针对从几分米深到 50 米深的浅水区。它提供了有关海床的宝贵信息:海底分类、水深测量、温度,以及有关渔业资源的信息。该项目期间建造的原型 USV 专为勘测沿海海水以及河流、湖泊和池塘等内陆水域而设计,现在允许将创新的 eBeem 系统部署在以前无法到达的区域和用例中,从而扩大监测区域并开拓新市场。此外,还开发了通用数据交换流程以简化丰富工作

激光雷达图像——从简单快照到移动 3D 全景图
激光雷达图像 – 从简单快照到移动 3D 全景图 ALLAN I. CARSWELL,安大略省旺市 摘要 激光雷达图像现在为越来越多的应用提供了独特的 3D 成像功能。激光雷达广泛用于测量固体表面的位置、形状和结构,用于勘测、测绘、定位和车辆导航。激光雷达还能进行水下海洋和水文测量,以进行水深测量、水质研究和水下资源识别。此类激光雷达可在机载、水面和水下平台上操作。激光雷达也已成为越来越多大气测量的首选传感器,包括气象和空气质量研究。此外,激光雷达成像已用于各种空间应用,包括行星探索以及航天器着陆、对接和会合。本文概述了这些应用的亮点以及未来的趋势和方向。
海上风电传输技术审查
图 3-1. 缅因湾水深测量 ...................................................................................................................................................... 4 图 3-2. 深水条件下海上风能传输链路的典型组件* ........................................................................................ 6 图 3-3. 半潜式(左)和驳船式(右)浮动 OSP 概念 ............................................................................................. 7 图 3-4. 浮动变电站的设计概念 ............................................................................................................................. 8 图 3-5. 深水固定基础类型 ............................................................................................................................................. 9 图 3-6. 水下海上变电站概念 ............................................................................................................................. 11 图 3-7. 典型的海上 HVAC 径向链路 ............................................................................................................................. 12 图 3-8. 典型的海上 HVDC 径向链路 ............................................................................................................................. 12 图 3-9. 根据传输距离选择交流还是直流 ............................................................................................................. 13 图 3-10.图 3-11. 基于 VSC-HVDC 的输电技术的可用额定值 ............................................................................................................. 15 图 3-11. 电缆传输功率-距离曲线 ............................................................................................................................. 17 图 4-1. 定制(径向)传输示意图* ............................................................................................................................. 19 图 4-2. 捆绑式海上输电设计* ............................................................................................................................. 20 图 4-3. 具有海上平台互连的海上电网* ............................................................................................................. 21 图 4-4. 典型的协调输电规划流程 ............................................................................................................. 22

内大陆架内部潮汐饱和度...
摘要:在此,我们开发了一个框架来理解第一部分中提出的观测结果。在这个框架中,由于随着水深 H 的减小幅度受限,内潮在变浅时会饱和。从这个框架可以推导出内潮平均能量的估计值;具体来说,能量 h APE i 、能量通量 h FE i 和能量通量发散 › xh FE i 。由于我们观察到耗散 h D i ' › xh FE i ,我们也将 › xh FE i 的估计值解释为 h D i 。这些估计值代表了内潮在内大陆架饱和时的能量参数化。参数化完全取决于深度平均分层和水深测量。总结一下,h APE i 、h FE i 和 › xh FE i 的跨陆架深度依赖性与冲浪区浅滩表面重力波的依赖性类似,这表明内陆架是内潮汐的冲浪区。针对一系列数据集对我们的简单参数化进行的测试表明,它具有广泛的适用性。