XiaoMi-AI文件搜索系统
World File Search System沿轨
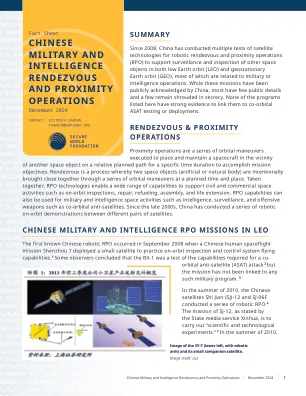
中国军事和情报部门会合......
近距操作是一系列轨道机动,目的是将航天器放置并保持在另一个空间物体附近,沿着相对计划的路径运行一段特定的时间,以完成任务目标。交会是一个过程,通过一系列轨道机动,两个空间物体(人造或自然体)在计划的时间和地点有意靠近。总之,RPO 技术能够实现多种功能,以支持民用和商业空间活动,例如在轨检查、维修、加油、组装和延长寿命。RPO 能力还可用于军事和情报空间活动,例如情报、监视和攻击性武器,如共轨反卫星。自 2000 年代后期以来,中国在不同的卫星对之间进行了一系列机器人在轨演示。


HEO Robotics 对民用空间态势感知服务范围信息请求的回应 - 机构/档案编号 RTID 0648-XV190 - 文件编号 2023-01556 - 2023 年 2 月 27 日
这种在轨检查利用现有的地球观测 (EO) 卫星平台网络,在传感器经过目标物体(例如在役卫星和太空垃圾)附近时进行成像。这种方法具有多种优势,可以快速构建在轨物体的能力,而无需花费时间或成本来开发定制的成像有效载荷或设计和发射专用卫星平台。

通过色散栅极传感表征的INSB双量子点中的变量和轨道依赖性自旋轨道场取向
利用色散栅极传感(DGS),我们研究了在INSB纳米线中定义的多电子双量子点(DQD)中的自旋轨道(B SO)方向。在表征间点隧道耦合的同时,我们发现测得的分散信号取决于电子电荷占用以及外部磁场的振幅和方向。当DQD被总奇数电子占据时,色散信号主要对外部场取向不敏感。对于由总数均匀数量占据的DQD,当有限的外部磁场与有效的B So取向对齐时,分散信号会降低。这一事实可以识别B的b方向,以实现不同的DQD电子占用。B SO取向在电荷跃迁之间差异很大,通常既不垂直于纳米线也不垂直于芯片平面。此外,B因此对于涉及相同价轨道的一对过渡对,并且在此类对之间有所不同。我们的工作是表征量子点系统中自旋轨道相互作用的DG的实用性,而无需通过设备的任何当前流量。
博士学位:用于大型天线的轨内制造,组装和操作的创新建模,原位识别和主动控制方法(MIC
大型孔径天线不仅可以为传统的通信服务和雷达提供帮助,还可以实现新的通信,遥感,深空探测和电力传输航天器的新方法。较高的天线孔可保证更高的信号分辨率和信噪比,而其精度则驱动其空间分辨率和灵敏度。在过去,开发高孔径天线是一项技术挑战,受到高刚度和重组件而针对发射限制的部署的限制,但最近在轨道上自主制造和组装方面的进步为直接在太空中直接开发的大型和光线结构的发展打开了大门。但是,如果许多文献中的许多作品都集中在空间中的大型天线制造上,那么[1]中的许多工程挑战,例如表面准确性,航天器稳定性和部署可靠性,仍然对这些技术的实际去风险施加限制。拟议的项目具有提出大型天线的欧洲端到端轨内组装方案的发展,并通过小规模的实验基准表明其关键技术挑战。通过利用团队中可用的技能建模和控制大型柔性结构[2,3]和天线技术[4,5],该项目将重点放在:
佘雨辰、李爽、刘宇飞、曹梦龙,“大型太空望远镜在轨机器人组装任务设计与规划”,J. Ast
摘要:研究大型空间望远镜(LST)的概念设计和在轨装配任务规划问题。提出了分段式镜面设计,并开发了考虑机械手工作空间覆盖范围的机器人装配概念。为了减少在轨装配周期并保护易碎的镜面结构,采用几种新算法优化机器人装配路径。首先,建立装配路径与装配件数之间的映射,快速生成优化问题的候选解。其次,提出了结合蚁群算法和遗传算法的两级混合优化框架。混合优化方法能够快速收敛到接近全局最优解。通过仿真验证了所提出的模型和算法,结果表明所开发的方法可以显著提高LST的在轨装配任务效率。 © 2020 光学仪器工程师协会 (SPIE) [DOI: 10.1117/1.JATIS.6.1.017002]