XiaoMi-AI文件搜索系统
World File Search System沿轨

具有轨至轨转换功能的 1 nS 1 V 低于 1 µW 线性 CMOS OTA ...
摘要:本文介绍了一种低跨导(0.62-6.28 nS)和低功耗(28-270 nW)的运算跨导放大器 (OTA),适用于生物医学传感器接口中的低频模拟前端。所提出的 OTA 基于通道长度调制效应实现了一种创新的高线性电压-电流转换器,可进行轨到轨驱动。在 1 V 电源和 1 V pp 非对称输入驱动下,电流-电压特性的线性误差为 1.5%,而输出电流的总谐波失真 (THD) 为 0.8%。对于对称 2 V pp 输入驱动,线性误差为 0.3%,而 THD 达到 0.2%。线性度对于失配和工艺电压与温度 (PVT) 变化具有很强的鲁棒性。跨导温度漂移为10 pS/◦C。原型电路采用180纳米CMOS工艺制造。

使用计算机视觉对居民空间对象检测到轨边缘的AI检测
太空领域的意识(SDA)对于确保空间操作的安全性和可持续性至关重要,尤其是当太空领域向有争议,退化和操作限制的环境过渡时。居民空间对象(RSO)的数量继续增长,传统的地面传感器面临覆盖范围和延迟的限制。这些传感器由于可预测的观察期而容易受到欺骗的影响。操纵可以将足够的错误引入轨道确定以引起轨道关联问题。此外,由于当前大多数高准确的SDA资产都是基于地面的,因此存在观测值的角度多样性。相关的是,随着月球和火星轨道政权变得越来越拥挤,SDA在这些地区的重要性将增长,对地面SDA面临重大挑战。
从太空监测温室气体 - 地球观测组织
在这 33 项已确定的任务中,大多数由公共实体推动(21 项,其中 13 项在轨运行)。此外,还有 7 项商业任务(其中 1 项在轨运行,1 项处于在轨全面运行前的最后试运行阶段)和 5 项混合任务(均在开发中),预计发射日期为 2040 年代。为了提供全面的概述,该数据库提供了有关任务所在国家或地区、贡献或协调组织、任务名称和相关仪器、任务状态(在轨、开发中、任务结束)、任务目标和应用、直接监测的温室气体数据(CO2、CH4、N2O)、潜在的政策相关应用(点源、国家和全球级别)和数据访问的具体任务信息。
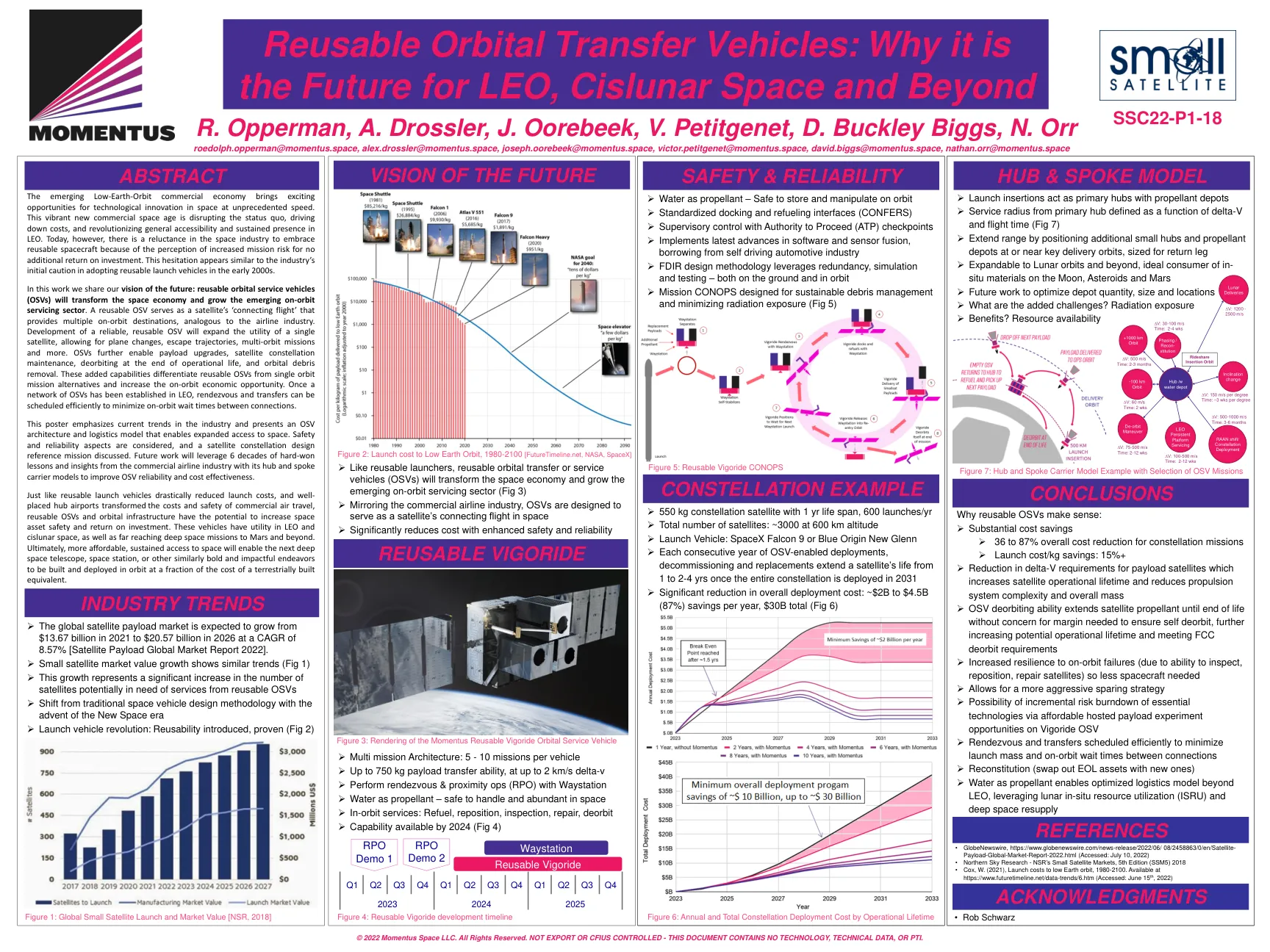
可重复使用的轨道转移飞行器
在这项工作中,我们分享了我们对未来的愿景:可重复使用的轨道服务飞行器(OSV)将改变太空经济并发展新兴的在轨服务行业。可重复使用的 OSV 充当卫星的“中转航班”,提供多个在轨目的地,类似于航空业。开发可靠的可重复使用的 OSV 将扩大单颗卫星的效用,允许更换平面、逃逸轨迹、多轨道任务等。OSV 进一步实现有效载荷升级、卫星星座维护、使用寿命结束时脱轨以及轨道碎片清除。这些附加功能将可重复使用的 OSV 与单轨道任务替代方案区分开来,并增加了在轨经济机会。一旦在低地球轨道建立了 OSV 网络,就可以有效地安排会合和转移,以最大限度地减少连接之间的在轨等待时间。

Toyota Proace Verso EV技术规格
和负载自适应减震器外部维度中等长度(mm)4,981 5,331总宽度(mm)1,920总高度(mm)1,895 1,940 1,940轴距(mm)轴距(mm)3,275前轨(mm)前轨(mm)1,630后轨(mm)1,611 1,61 1,6118前(MM)(MM)(MM)(MM)(MM) (MM)803 1,152内部尺寸中等长内部长度(mm)3,161 3,511内部宽度(mm)1,515负载面积量 - 加载到Tonneau盖(L)

仿真建模实践与理论
本文提出了几种用于复杂在轨高自由度机器人的任务空间控制方法。这些方法包括冗余分辨率,并考虑了在轨机器人系统的非线性动态模型。在需要复杂人形机器人视觉伺服任务的几种在轨服务操作中探索了所提出的任务空间控制方法的适用性。一个统一的开源空间机器人模拟框架,称为 OnOrbitROS,用于评估所提出的控制系统并将其行为与最先进的现有系统进行比较。所采用的框架基于 ROS,包括并再现了最终空间机器人和机械手在轨服务场景中可能遇到的主要环境条件。介绍了开发的不同软件模块的架构及其在复杂空间机器人系统上的应用。使用所提出的 OnOrbitROS 框架实现了高效的实时实现。所提出的控制器用于执行人形机器人的引导。机器人动力学被集成到控制器的定义中,并在结果部分描述了结果和实际属性的分析。

太空中的前 100 个 FEEP 推进系统
2018 年,ENPULSION NANO 推进系统的在轨演示标志着液态金属场发射电推进系统首次在太空中测试,也标志着 ENPULSION NANO 的成功推出。此后的四年中,该推进系统成功实现工业化,136 个系统已在 61 艘不同的航天器上飞行。与此同时,基于 FEEP 技术的新型推进系统也得到了开发,扩大了推力和功率范围,并引入了新功能以及从 ENPULSION NANO 的庞大太空遗产中吸取的经验教训。到目前为止,其中两个新型推进系统已经发射到太空。本文介绍了来自多个航天器的 ENPULSION NANO 遥测数据,包括更大的轨道变化机动,并讨论了迄今为止利用 ENPULSION NANO 系统的应用。然后,我们概述了 ENPULSION 推进系统的当前在轨统计数据。我们展示了 ENPULSION NANO 的汇总在轨统计数据,讨论了遇到的挑战并介绍了在不同设施进行的在轨运行、客户 AIT 支持和地面测试活动期间得到的经验教训。

革命性成像技术实验室
机载图像处理算法探索 算法硬件在环测试 快速平面卫星原型设计和实验 相机/焦平面概念开发 飞行硬件功能测试 在轨有效载荷“操作孪生”,在“飞行”时进行开发 在轨场景重建和异常解决 政府拥有和运营的有效载荷验证和确认

创新和原型收购 Delta
负责运营美国太空部队唯一的 24/7 原型卫星 C2 运营 REPR 卫星运营中心:提供在轨实验和原型设计、创新的操作开发概念和改变游戏规则的技术演示 为支持在轨任务而制作和运营新兴地面 C2 系统的原型 移动靶场运营

中国军事和情报会合和...
近距操作是一系列轨道机动,目的是将航天器放置并保持在另一空间物体附近的相对规划路径上一段特定的时间,以完成任务目标。交会是一个过程,其中两个空间物体(人造或自然体)通过一系列轨道机动在计划的时间和地点故意靠近。总之,RPO 技术能够实现广泛的能力来支持民用和商业空间活动,例如在轨检查、维修、加油、组装和延长寿命。RPO 能力还可用于军事和情报空间活动,例如情报、监视和攻击性武器(如共轨反卫星)。自 2000 年代后期以来,中国在不同的卫星对之间进行了一系列机器人在轨演示。