XiaoMi-AI文件搜索系统
World File Search System测试对象

在没有被感觉集检测到的障碍的情况下,一种增强移动机器人导航的人类方法
人类的方法可以通过使用户成为控制循环的积极部分来大大增强人类 - 机器人的交互,后者可以向机器人提供反馈以增强其功能。在所有安全性的情况下,例如在辅助机器人技术中,这种反馈变得更加重要。这项研究旨在实现一种人类的方法,在该方法中,人类可以向特定机器人(即智能轮椅)提供反馈,以增强其人工感官套装,扩展并提高其检测和避免障碍的能力。反馈由键盘和大脑 - 计算机接口提供:在此范围内,工作还包括一个协议设计阶段,以引起和唤起人脑事件 - 相关潜力。整个体系结构已在模拟机器人环境中得到验证,并从不同的测试对象获得了脑电图信号。

国际空间站脱轨分析摘要
美国宇航局及其四个航天局合作伙伴——加拿大航天局 (CSA)、欧洲航天局 (ESA)、日本宇宙航空研究开发机构 (JAXA) 和俄罗斯国家航天公司“Roscosmos”——在二十多年的载人空间站运行期间进行了数千次太空实验,并吸引了数千万学生参与。空间站上的技术演示和开发推动了最先进的应用,对地球和太空都有好处。空间站上部署的气候传感器验证了气候模型,并提供了有关地球不断变化的气候环境的大量新信息,而空间站上的空间科学仪器则增进了我们对中子星和暗物质等现象的认识。空间站机组人员也是实验的重要组成部分,他们自愿作为测试对象,研究人类对微重力生活和工作的适应性。如果不继续进行这些长期的演示和人车联合系统实验,人类对太阳系的探索将是不可能的。

无人机惯性在线测量...
动力学模型及其参数的辨识是机器人技术和系统动力学建模领域的基本问题之一。对于物体具有六个自由度 (6-DOF) 的一般情况,例如无人机 (UAV) 的情况,关键物理参数是飞行器质量和转动惯量。尽管无人机质量及其几何/拓扑结构很容易获得,但考虑到惯性张量无法通过静态试验测量,因此很难辨识。本文介绍了一种基于双线摆和机载集成传感器系统的简单有效的刚体惯性在线估计方法。其中,测试对象(即无人机)由两根细平行线悬挂,形成绕垂直轴的双线扭摆。使用无人机飞行控制器 (FC) 单元的机载传感器记录和处理摆锤振动,以获得用于最终惯性估计阶段的无趋势和无噪声信号。针对与无人机控制箱和完整无人机配置相关的两个典型悬浮物体案例,通过实验验证了所提出的识别算法。

冬季|春季2024
我们从本年开始,通过一系列计划,展示了研究的潜力,有可能带来医疗服务的重大进展。理查德·安德森(Richard Andersen)的团队正在开发脑机界面,使人们能够通过控制软件和机器人技术来克服身体瘫痪。Dianne Newman正在研究一种抗生素耐药细菌,这是伤口感染的常见原因,并且正在通过破坏其代谢来对抗这种病原体的新方法取得重大进展。安德烈·霍尔兹(AndréHoelz)的实验室正在研究核孔复合物(核孔复合体),这是每个细胞的组成部分,作为保护其遗传信息的“守门人”,以探讨如何更好地了解其功能可能导致新的疾病疗法。Sarkis Mazmanian将讨论他的团队发现肠道微生物组与自闭症之间的联系,并根据这项工作向我们介绍了一项试点研究,该研究表明了减轻测试对象的焦虑和烦躁的希望。

3 度自由度测量的应用 ...
无人机技术的发展正在迅速发展,在制造飞机时,需要对作用在飞机上的空气动力进行分析。气动力分析可以通过风洞和水洞进行。可以使用可视化进行测量,但该方法不提供直接的气动力值。因此不能直接进行空气动力分析。可以使用带有称重传感器的力测量系统来进行空气动力测量。气动力测量系统应用可以直接分析气动力,因为力读数值直接以图形形式显示。该测量仪器使用称重传感器作为传感器,然后使用微控制器处理来自称重传感器的数据并显示在计算机上。经测试,该测力仪可以根据被测载荷测量出曳力和升力,误差较小。此外,可以使用该力测量系统来确定力矩。因此该系统可以测量3个自由度的空气动力,该测力系统还可以显示测试对象所受到的空气动力的方向。关键词:无人机、称重传感器、微控制器、气动力
doi:10.29026/oes.2023.220023深度学习辅助变异性希尔伯特定量阶段成像
我们提出了一个针对相对低载体频率全息图的高准确伪像的单帧数字全息相位解调方案 - 深度学习辅助变异性希尔伯特·希尔伯特定量相成像(DL-VHQPI)。该方法将传统的深神经网络纳入完整的物理模型,利用残留补偿的想法可靠,可靠地恢复测试对象的定量相信息。它可以在略有非轴数数字全息系统下显着拟合频谱重叠引起的相伪影。与常规的端到端网络(无物理模型)相比,所提出的方法可以在维护成像质量和模型概括的同时减少数据集大小。DL-VHQPI通过Numerical Simulation进行定量研究。活细胞实验旨在证明该方法在生物学研究中的实用性。深度学习辅助物理模型的拟议思想可能扩展到各种计算成像技术。
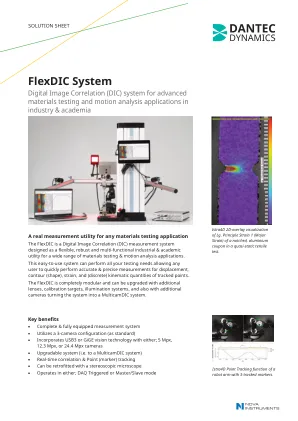
flexdic系统
测量原理一个随机模式被应用于测试对象的表面。该图案可以用白色的基颜色喷洒,并在顶部撒上黑色。用两个高速传感器观察到表面。首先测量轮廓,然后使用特定模式匹配算法鉴定随机结构的每个捕获的图像同源点。每个对象点的三维位置由软件执行的三角剖分确定。如果在对象的位移过程中记录了图像序列,则自动计算每个对象点的变形。动态测量范围系统独特地结合了全场光学测量和高节奏分辨率的高空间分辨。动态范围从静态到超过20.000 Hz,其能力从µm范围到几个10 cm的位移。分辨率对应于视场的10-5,例如用于A4纸尺寸测量区域的几µm。菌株范围从100 µScrains不等到数百分之100%。

Spine Cop:姿势矫正监测器和助手
摘要:背部和脊柱相关问题是大多数人一生中经常遇到或将要遇到的疾病。可以做出的一个常见且明智的观察是关于个人的姿势。我们提出了一种新方法,将加速度计、陀螺仪和磁力计传感器数据与永磁体相结合,组装成一个可穿戴设备,能够实时监测脊柱姿势。每个用户都需要对设备进行独立校准。传感器数据由概率分类算法处理,该算法将实时数据与校准结果进行比较,验证数据点是否位于计算阈值定义的置信区域内。如果加速度计和磁力计都将姿势分类为不正确,则认为姿势分类不正确。在单个成年测试对象中进行了试点试验。磁铁和磁力计的组合大大提高了姿势分类准确度(89%),而仅使用加速度计数据时获得的准确度(47%)则为准确度。该方法的验证基于图像分析。

SARS-CoV-2(COVID-19)疫苗研发与生产:道德之路
摘要:全世界都在等待 SARS-CoV-2 病毒(即 COVID-19 疾病)疫苗,以保持民众健康,全面重启经济,并使其社会和医疗保健系统恢复“正常”。疫苗的安全性和有效性需要细致的测试和监督;本文描述了尽管公开声明夸张,但当前的疫苗开发、测试和生产方法可能被证明在道德上存在问题、在医学上存在危险,并且在社会上不稳定。基本的道德担忧是对人类测试对象以及最终许多疫苗接种者的健康的潜在危害。由于经济和政治压力,政府减少了对仓促的疫苗测试和生产的监督、民族主义的分配目标以及未能规划产生全球群体免疫所需的广泛免疫接种,这进一步复杂化了这一问题。正如本文所言,公众必须更好地了解情况,以评估正在生产的新型疫苗的承诺,并容忍延误和不确定性。
采用非线性自回归外生模型的可穿戴 sEMG 传感器多自由度假手指关节控制器
摘要:手臂、手和指尖的活动功能和感觉信息的丧失妨碍了患者的日常生活活动 (ADL)。现代仿生假手可以弥补失去的功能并实现多自由度 (DoF) 运动。然而,由于传感器有限和缺乏稳定的分类算法,市售的假手通常具有有限的自由度。本研究旨在提出一种通过表面肌电图 (sEMG) 估计手指关节角度的控制器。用于训练的 sEMG 数据是使用商用 EMG 传感器 Myo 臂带收集的。提取时域中的两个特征并将其输入到具有外生输入的非线性自回归模型 (NARX) 中。使用 Levenberg-Marquardt 算法对 NARX 模型进行预选参数训练。与目标相比,模型输出的回归相关系数 (R) 在所有测试对象中均大于 0.982,信号范围为 [0, 255] 的任意单位时均方误差小于 10.02。研究还表明,所提出的模型可用于日常生活运动,具有良好的准确性和泛化能力。