XiaoMi-AI文件搜索系统
World File Search System特步
熊彼特经济中的阶级斗争
本研究探讨了熊彼特经济中工人和资本家之间的阶级斗争,在熊彼特经济中,经济增长是由市场经济中的创新驱动的。我们将企业市场力量的限制视为一种政策工具,并分别推导出工人和资本家的最优水平。资本家更喜欢强大的垄断企业,但工人也更喜欢拥有一定市场力量的企业,因为利润可以激励创新。工人效用最大化的垄断力量程度在贴现率上下降,但在创新生产率和质量步长上增加。资本家效用最大化的垄断力量程度在质量步长上增加。我们用这两种垄断力量程度的差异来衡量他们之间冲突的严重程度,当工人的贴现率下降或创新生产率上升时,冲突会变得不那么严重。最后,在小(大)质量步长下,扩大质量步长会减轻(加剧)他们的冲突。
熊彼特经济中的阶级斗争
本研究探讨了熊彼特经济中工人和资本家之间的阶级斗争,在熊彼特经济中,经济增长是由市场经济中的创新驱动的。我们将企业市场力量的限制视为一种政策工具,并分别推导出工人和资本家的最优水平。资本家更喜欢强大的垄断企业,但工人也更喜欢拥有一定市场力量的企业,因为利润可以激励创新。工人效用最大化的垄断力量程度在贴现率上下降,但在创新生产率和质量步长上增加。资本家效用最大化的垄断力量程度在质量步长上增加。我们用这两种垄断力量程度的差异来衡量他们之间冲突的严重程度,当工人的贴现率下降或创新生产率上升时,冲突会变得不那么严重。最后,在小(大)质量步长下,扩大质量步长会减轻(加剧)他们的冲突。
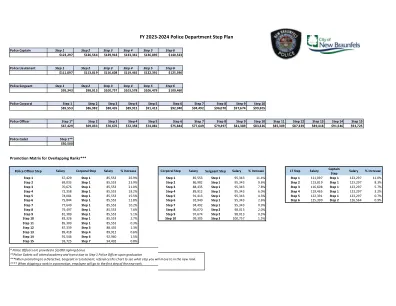
2023-2024 财年警察局分步计划
步骤 1 67,429 步骤 1 85,553 26.9% 步骤 1 85,553 步骤 1 95,343 11.4% 步骤 1 111,097 步骤 1 123,297 11.0% 步骤 2 69,033 步骤 1 85,553 23.9% 步骤 2 86,982 步骤 1 95,343 9.6% 步骤 2 113,819 步骤 1 123,297 8.3% 步骤 3 70,676 步骤 1 85,553 21.0% 步骤 3 88,435 步骤 1 95,343 7.8% 步骤 3 116,608 步骤 1 123,297 5.7% 步骤 4 72,358步骤 1 85,553 18.2% 步骤 4 89,912 步骤 1 95,343 6.0% 步骤 4 119,465 步骤 1 123,297 3.2% 步骤 5 74,081 步骤 1 85,553 15.5% 步骤 5 91,413 步骤 1 95,343 4.3% 步骤 5 122,391 步骤 1 123,297 0.7% 步骤 6 75,844 步骤 1 85,553 12.8% 步骤 6 92,940 步骤 1 95,343 2.6% 步骤 6 125,390 步骤 2 126,564 0.9% 步骤 7 77,649 步骤 1 85,553 10.2% 第 7 步 94,492 第 1 步 95,343 0.9% 第 8 步 79,497 第 1 步 85,553 7.6% 第 8 步 96,070 第 2 步 98,013 2.0% 第 9 步 81,389 第 1 步 85,553 5.1% 第 9 步 97,674 第 2 步 98,013 0.3% 第 10 步 83,326 第 1 步 85,553 2.7% 第 10 步 99,305 第 3 步 100,757 1.5% 第 11 步 85,309 第 1 步 85,553 0.3% 第 12 步 87,339 第 3 步 88,435 1.3% 第 13 步89,418 第 4 步 89,912 0.6% 第 14 步 91,546 第 6 步 92,940 1.5% 第 15 步 93,725 第 7 步 94,492 0.8%
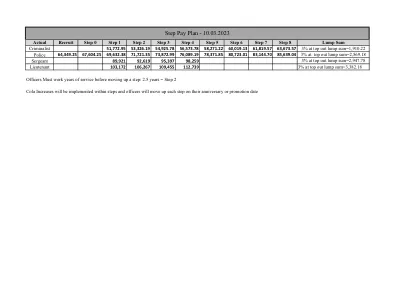
2024 步骤计划.xlsx
实际招募 第 0 步 第 1 步 第 2 步 第 3 步 第 4 步 第 5 步 第 6 步 第 7 步 第 8 步 刑事侦查员 51,772.95 53,326.19 54,925.78 56,573.78 58,271.22 60,019.13 61,819.57 63,673.57 警察 64,349.25 67,604.25 69,632.38 71,721.35 73,872.99 76,089.19 78,371.85 80,723.01 83,144.70 85,639.04 警长 89,921 92,619 95,397 98,259中尉 103,172 106,267 109,455 112,739

带稳定性增强器的无尾飞行器增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模(IBS)控制器,用于无尾飞机的轨迹控制,该控制器具有未知干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种限制虚拟控制输入速率和幅度的稳定性增强器(SE)。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,将激活第一层 SE 来修改轨迹跟踪误差;当虚拟控制输入超出边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。在 SE 的帮助下,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数自适应估计器,与 IBS 相结合,使控制器表现出良好的鲁棒性。最后,给出了两个仿真。第一次仿真表明系统对外部干扰和模型不确定性不敏感,第二次仿真证明了 SE 的有效性。
基于反步滑模的共轴旋翼飞行器轨迹跟踪控制算法及试验
摘要:针对共轴旋翼飞行器自主飞行过程中模型参数的不确定性、外界扰动及传感器噪声对飞行的影响,研究位置姿态反馈控制系统的鲁棒反步滑模控制算法,以解决未知外界干扰情况下飞行器的轨迹跟踪问题。本文针对未知飞行,建立了基于受扰共轴旋翼飞行器的非线性动力学模型。然后,设计了非线性鲁棒反步滑模控制器,分为共轴旋翼飞行器的姿态控制器和位置控制器两个子控制器。在控制器中引入虚拟控制,构造Lyapunov函数,保证各子系统的稳定性。通过数值仿真验证了所提控制器的有效性。最后通过飞行试验验证了反步滑模控制算法的有效性。
文章 带稳定性增强器的无尾飞机增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模 (IBS) 控制器,用于无尾飞机的轨迹控制,该飞机具有未知的干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种稳定性增强器 (SE),它限制了虚拟控制输入的速率和幅度。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,第一层 SE 将被激活以修改轨迹跟踪误差;当虚拟控制输入超过边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。借助 SE,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数的自适应估计器,与 IBS 一起,使控制器表现出出色的鲁棒性。最后,给出了两个仿真结果。第一次仿真表明系统对外界干扰和模型不确定性不敏感,第二次仿真证明了SE的有效性。
特伦特充实计划课程指南
Lisa 在过去 13 年一直从事瑜伽教学,拥有瑜伽(包括儿童瑜伽和青少年瑜伽)、瑜伽疗法、气瑜伽和健身方面的认证。Lisa 在彼得伯勒拥有一家家庭工作室,提供虚拟课程和研讨会。12 对时尚的热情一本入门指南,介绍女性时尚如何成为其所穿着历史时期的道德和经济状况的文本。了解时尚界的主要影响者,包括 Lady Lucille Duff Gordon、Coco Channel 及其名人。将讨论时尚灾难、致命时尚和社会页面的作用的故事。学生将能够解释时尚如何在 20 世纪早期北美和英国塑造女性的政治和道德方面发挥作用。有动手设计的部分,学生将制作自己的时装进行讨论。还将包括设计挑战和游戏。

Draft-drought-plan-PUBLIC.pdf - 塞文特伦特有限公司
执行摘要 这是 Severn Trent Water 法定干旱计划的草案版本。此干旱计划将涵盖 2019-24 年期间。它是对我们于 2014 年 2 月发布的计划的更新。我们制定干旱计划来解释我们如何在我们所在地区发生干旱时管理供水和供需。我们的计划旨在平衡客户、环境和更广泛的经济利益。该计划帮助我们和我们的利益相关者在正确的时间做出正确的决定,并展示了我们如何在干旱期间为客户提供持续的水供应。为了制定此计划,我们将干旱定义为可用水量明显低于正常水平 1 的时期,持续三个月或更长。任何特定干旱的影响是否主要集中在环境、公共供水或更广泛经济中的其他用水者将取决于每次干旱的个体特征。所有干旱的严重程度、范围和持续时间都不同。干旱是自然发生的事件,我们无法计划阻止其发生。相反,我们计划在干旱发生时尽量减少其影响。该计划与 2014-19 年计划的主要改进和变化如下:

特温特大学 商业信息技术硕士
标准 1. 预期学习成果 商业信息技术理学硕士的概况和目标适合该领域的学术硕士课程。该课程的目标已被转化为一套精心制定的、最新的课程预期学习成果 (PILO),与学术和专业领域的要求相一致。小组指出,PILO 中没有明确提到可持续性的各个方面。至少可持续性的生态或环境维度在当今世界至关重要;因此,小组鼓励该课程在未来更新 PILO 时明确考虑可持续性(的各个方面)。小组的结论是,该课程有一个活跃的外部咨询委员会,以使 PILO 与专业领域的要求保持联系。 标准 2. 教学环境 商业信息技术理学硕士的课程反映了该课程的预期学习成果。该课程采用多种激活和启发性的教学方法。行业的参与(例如通过项目或研究实习)也是一个积极的方面。学生们得到了良好的支持和指导,但他们表示,他们更喜欢“社区感”。小组鼓励该项目探索如何增强社区感,并建议引入指导计划可以促进这一点。此外,该项目理想情况下应简化其沟通渠道,以避免信息分散。小组发现,该项目为学生提供了许多不同的机会来建立(个人)档案。通过提供学习路径/轨迹的示例,该项目可能会对学生更具吸引力;小组的印象是,该项目提供的选择比目前公布的要多得多。例如,学生毕业后不能攻读博士学位。通过向学生展示一条为他们做好学术生涯准备的学习路径,学生可能会更有动力选择这一选项。教学人员在学术活动和教学资格方面都很称职。小组发现,该项目部署了一套很好的委员会和举措来照顾项目的质量和连贯性。该项目愿意接受反馈,并愿意采取措施自我改进。标准 3. 学生评估 该项目拥有可靠、有效和透明的评估系统。有足够的程序来设计和保证考试和作业的质量。考试委员会履行其法定职责。小组认为该项目有机会优化论文评估。小组希望论文评估表上的评论能够说明为什么选择评分标准中的特定分数,和/或提供关于学生在评分标准中的特定点方面表现的更深入的信息。小组建议该计划重新审视评估表的设置和使用方式,以确保明确给出某些分数的原因。此外,小组认为考官倾向于对硕士论文评分过高,并强烈建议重新校准。最后,必须通过在将来将个人评估存档来确保论文评估的可追溯性。