XiaoMi-AI文件搜索系统
World File Search System目标任务

虚拟现实作为手动航天器对接的培训援助
可以在太空任务期间手动将航天器对接到空间站的能力对于宇航员至关重要。基于计算机的自学习程序6DF是一个抽象的对接模拟,用于习得和维护基础技能,以控制六个自由度。这项复杂任务的困难之一是仅基于二维信息来构建空间中自己位置和方向的心理表示。为了促进这一点,并可能进一步改善了学习过程,测试了该程序的新的三维(3D)立体声范围内显示。这项研究调查了与标准2D呈现相比,3D演示的学习进度是否更快。24个与ESA(AGBRESA)的人工重力床REST研究的参与者参加了6DF对接实验。他们每个人完成了20次培训课程,持续了大约45分钟,每周进行两次。学习计划是自给自足的,并适应了个人学习速度。一半的参与者被呈现基于统一的立体声镜头可视化对接的范围可视化,而另一半则使用了学习程序6DF的标准2D版本。学习进度是作为达到目标任务所需的任务数量的。结果总体表明,使用3D技术时的学习进度略高,但没有长期的性能优势。较小的好处可能无法证明使用价格更高且在操作上限制3D系统的使用是合理的。

用不精确监督标记的数据生成
最近的高级深度学习技术显示了各种领域的有希望的结果,例如计算机视觉和自然语言处理。深度神经网络在监督学习中的成功在很大程度上依赖大量标记的数据。但是,由于标签和隐私问题的成本等各种原因,以目标标签获得标记的数据通常是具有挑战性的,这些原因挑战了现有的深层模型。尽管如此,使用不精确监督的数据相对容易,即具有与目标任务相关的标签/标签。例如,社交媒体平台上有数十亿个具有自定义标签的帖子和图像,这些帖子和图像不是目标分类任务的确切标签,但通常与目标标签有关。有望利用这些标签(不精确的监督)及其与目标类别的关系来生成标记的数据以促进下游分类任务。但是,对此的工作非常有限。因此,我们研究了一个新的问题,该问题是通过不精确监督标记的数据生成。我们提出了一个名为Addes的新颖生成框架,可以通过通过不精确的监督和不固有的监督和目标类别之间的关系从数据中学习,可以合成目标分类任务的高质量LA。图像和文本数据集的实验结果演示了提出的添加的有效性,以生成来自不精确监督的现实标记数据,以促进目标分类任务。

通过恢复策略
摘要 - 离线目标条件的强化学习(GCRL)的目的是通过脱机数据集的稀疏重新解决目标解决目标任务。虽然先前的工作已经阐明了代理商学习近乎最佳策略的各种方法,但在处理复杂环境(例如安全限制)中处理各种约束时,这些方法会遇到限制。其中一些方法优先考虑目标,而无需考虑安全性,而其他方法则以牺牲培训效率为代价而过度关注安全性。在本文中,我们研究了限制离线GCRL的问题,并提出了一种称为基于恢复的监督学习(RBSL)的新方法,以完成具有各种目标的安全至关重要的任务。为了评估方法性能,我们基于具有随机定位的障碍物的机器人提取环境建立基准测试,并使用专家或随机策略来生成离线数据集。我们将RBSL与三种离线GCRL算法和一种离线安全RL算法进行比较。结果,我们的方法在很大程度上可以执行现有的最新方法。此外,我们通过将RBSL部署在真正的熊猫机械手上来验证RBSL的实用性和有效性。代码可在https://github.com/sunlighted/rbsl.git上找到。

遗传转移学习
传统的机器学习技术尝试一次解决一个问题。和一些复杂的问题需要大量时间来解决经典的机器学习技术。同样,如果没有足够的有关问题的信息,有时很难获得确切的解决方案。图1显示了传统机器学习技术和转移学习技术之间学习过程的差异。传统的机器学习技术试图从头开始学习每个任务,而转移学习技术则尝试通过一些培训数据将知识从以前的任务转移到新的目标任务(Pan&Yang,2008)。在现实生活中,人类可以通过在问题领域中使用其过去的经验来轻松解决复杂的问题。转移学习是一种类似人类的学习策略,旨在通过使用从先前解决的相关任务中获得的信息来帮助解决问题和学习机制。转移学习用于许多学习方法(例如神经网络(Murre,1995; Pratt,1993),马尔可夫逻辑网络(Mihalkova,Huynh,&Mooney,2007; Mihalkova&Mooney,2006),文本分类(Gupta&Ratinov,2008),Web PagePage clas-sii ever(line)。转移学习的关键问题是任务相关性。挖掘任务是否与之相关,将信息在其中传输的信息非常重要或如何相关。并确定两个任务之间的转移信息,是否要传输多少信息以及如何传输信息。
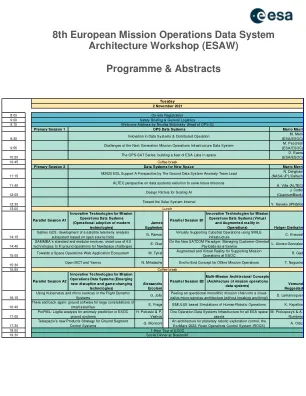
第 8 届欧洲任务运营数据系统架构...
卫星地面段子系统的开发传统上与使用整合的产品和技术有关,这些产品和技术通常是为这些特定目的而临时开发的,然后维护多年,以避免昂贵的重新验证活动。这种方法为操作提供了安全可靠的基础,但对子系统的发展施加了一些限制和延迟,并阻止了使用可以彻底提高其效率的最新技术。一种有前途的替代方案是从单片子系统(通常实现许多不同的功能)过渡到涵盖更精简的功能集(甚至单个功能)的服务集合;该过程可以与在模块化和可扩展架构中引入开源软件组件相关联,这允许在后台保持旧式和可靠的核心系统功能,而其他一些功能则被更现代的解决方案所取代。该解决方案可以缩短开发时间,并简化未来改进的快速整合,将精力集中在针对运营商特定目的的定制上。为了将这一概念付诸实践,伽利略是一个很好的目标任务,它是一个长期而稳定的项目,对运营商的要求越来越高,并且迫切需要拥有一个能够应对最新过时和安全需求的现代 GCS 架构。在这种情况下,星座性能和遥测分析的要求推动了在要求极高的环境中定义灵活且可扩展的仪表板和流程,需要管理大量数据。通过使用通用 API 和标准数据结构,可以直接将附加工具(例如高级数据分析工具)合并到子系统中,而无需进行昂贵的调整。本文将展示集成过程中遵循的流程和获得的结果,特别是在常规操作、性能分析、LEOP 支持或 KPI 监控方面的附加值。

使用深度学习从 fMRI 进行自然图像重建:一项调查
1.1. 使用 fMRI 进行视觉解码 许多脑成像研究集中于解码人脑如何表示有关外部世界的信息。考虑到大多数外部感官信息是由人类视觉系统处理的( Logothetis 和 Sheinberg,1996 ),需要更深入地了解人脑的视觉信息处理,这促使建立能够表征视觉刺激内容的复杂计算模型。这个问题被称为人类对感知图像的视觉解码,并受到越来越多的关注。功能性磁共振成像(fMRI)在最近的神经科学研究中取得了重大进展( Poldrack 和 Farah,2015;Nestor 等,2020 )。fMRI 技术通过测量血氧水平的变化来捕捉大脑中的神经活动( Ogawa 等,1990;Bandettini,2012 )。在各种脑成像技术中,fMRI 是非侵入性的并且具有很高的空间分辨率。这些特性使得 fMRI 能够用于广泛的问题,包括神经系统疾病诊断(Rakhimberdina 等,2020;Zhang 等,2020)和人类视觉解码(Haxby 等,2001;Kamitani and Tong,2005;Horikawa and Kamitani,2017)。人类视觉解码领域的最新进展表明,除了仅仅对视觉刺激的信息进行编码(Poldrack and Farah,2015)之外,fMRI 捕捉到的大脑活动还可用于重建视觉刺激信息(Kay 等,2008;Roelfsema 等,2018)。根据目标任务,人类视觉解码可分为刺激类别分类、刺激识别和重建(Naselaris 等,2011)。在分类中,大脑活动用于预测所呈现刺激的离散对象类别(Haxby 等人,2001;Horikawa 和 Kamitani,2017)。识别的目标是从一组已知的刺激图像中识别出与给定大脑活动模式相对应的特定刺激

探索小型,中和大型企业的在线微目标实践
Facebook和其他广告平台通过允许广告商选择特定用户并用精心制作的消息来瞄准用户的数据来利用用户的数据(该实践称为微目标)。但是,诸如Cambridge Analytica之类的广告客户恶意使用这些定位功能在选举中操纵用户。欧洲委员会计划在《新欧洲民主行动计划法》中限制甚至禁止某些目标功能,以保护用户免受这种伤害。难以找到适当的限制,我们不知道这些限制对常规广告商的经济影响。在本文中,为了告知辩论,我们通过了解谁在Facebook上进行广告以及他们如何使用广告平台的目标功能迈出了第一步。为此,我们要求890个美国用户在其浏览器上安装监视工具,以收集他们在Facebook上收到的广告,以及有关这些广告的目标的信息。通过将Facebook上的广告客户与他们的LinkedIn配置文件匹配,我们可以看到71%的广告客户是中小型企业,有200名员工或更少的员工,他们负责61%的广告和57%的广告印象。关于微目标,我们发现我们的数据集微目标中只有32%的中小型企业和30%的大型企业至少一个广告。这些结果不应被解释为微目标不是作为营销策略而有用的,而是广告商更喜欢将微目标任务外包给广告平台。的确,为了传递广告,Facebook正在采用优化算法来利用用户数据来确定哪些用户应查看哪些广告;这基本上意味着广告平台正在执行算法驱动的微目标。因此,在设定微目标的限制时,立法者应考虑传统广告客户驱动的微目标以及广告平台执行的算法驱动的微目标。

培训与评估大纲报告 - Army.mil
条件:当该部队接到任务命令和上级总部 (HQ) 指挥官的指导,指示其进行飞机维护行动,以支持作战营/中队的指定飞机时,该部队正在支援指定的行动。主指挥所 (CP) 已经建立,该部队拥有合格的人员和作战设备,可在所有环境条件下在动态复杂的作战环境 (OE) 中提供昼夜维护支持并执行维持行动。所有授权的专用工具和所需的测试设备均可操作、使用、校准(如果需要)并随时可用。生产控制 (PC) 部门接收和处理维护请求,并提交给组件/机身维修排采取维护行动。自动记录系统用于处理和跟踪维护请求。与上级总部、相邻和受支持的单位以及下属单位建立通信和数字连接;并按照上级总部的要求传递信息。此任务的某些迭代应在 MOPP 4 中执行。标准:该单位根据命令、已发布的指令和规定、适当的技术手册 (TM)、维护标准操作程序 (SOP)、指挥官的意图和 ATP 3-04.7 进行飞机维护支持。使用自动记录系统接收、处理和跟踪来自受支持单位的维护工作请求。单位维护人员进行飞机维护以支持所有分配的飞机和设备。飞机维护支持根据命令中指定的时间表和单位的维护 SOP 完成。根据适用的飞机 TM 和出版物完成所需的飞机维护并进行检查。所有分配的维护人员都遵守安全程序。该单位向更高级别的总部报告准确和及时的信息。领导者注意事项:使用该单位授权的组织和设备修改表 (MTOE) 来确定执行此任务所需的关键领导者。在任务评估期间,记录在目标任务评估标准矩阵中参加培训/要求的领导者百分比。MTOE 授权的关键领导者包括指挥官、执行官、参谋科/分队/团队军官、排长、指挥军士长、一级军士、排长、科长和团队领导。实弹射击:否

MEG通过深度学习
功能性脑活动的准确定位具有希望使我们老龄化社会至关重要的新型治疗和辅助技术。世界人口的老龄化增加了与年龄有关的健康问题的患病率,例如身体伤害,精神障碍和中风,导致对患者,家庭和医疗保健系统的严重后果。新兴技术可以通过(i)提供有效的神经居住以及(ii)实现日常任务独立性来改善患者的生活质量。第一个挑战可以通过设计可以增强特定认知功能或治疗特定精神病/神经病理性的神经调节性接口系统来解决。这种系统可以由实时大脑活动驱动,以使用诸如经颅磁刺激[1、2]或聚焦超声[3,4]等方法选择性地调节特定的神经动力学。第二个挑战可以通过设计有效的脑机界面(BMI)来解决。常见的BMI控制信号依赖于主感觉或运动相关的激活。但是,这些信号仅反映了有限的认知过程。高阶认知信号,尤其是编码面向目标任务的前额叶皮层的高级认知信号,可能会导致更健壮和直观的BMI [5,6]。NeuroRehabicitation和BMI方法都需要一种实时测量和定位功能性脑活动的有效方法。这可以通过脑电图(EEG)[7,8]和MEG [9-11],两种非侵入性电物质技术技术来实现。eeg使用放置在头皮上的一系列电极来记录电压弹性,而MEG使用称为超导量的Quantum-tum干扰装置(Squid)[12]的敏感磁性检测器来测量在EEG中产生电势分布的相同主要电流。由于EEG和MEG捕获了由神经元电流产生的电磁场,因此它们提供了神经元活性的快速直接指数。但是,现有的MEG/EEG来源定位方法提供了有限的空间分辨率,使可以用于神经康复或BMI的信号的起源混淆,或者太慢而无法实时计算。深度学习(DL)[13]提供了一种有希望的新方法,可以实时改善源本地化。越来越多的作品成功地将DL运用到
培训与评估大纲报告 - Army.mil
条件:当该部队收到上级总部 (HQ) 指挥官的任务命令,指示其执行被击落飞机(地面或空中)回收以支援作战营/中队的指定飞机(有人驾驶和/或无人驾驶)时,该部队正在执行指定行动。主指挥所 (CP) 已经建立,并且该部队拥有支持任务的合格人员和作战设备。经过训练的击落飞机回收小组 (DART) 人员可根据审批机构的授权在任何环境条件下在动态和复杂的作战环境 (OE) 中执行昼夜击落飞机(地面或空中)回收或销毁操作。规定的飞机撤离回收工具包;测试、测量和诊断设备 (TMDE);以及特殊工具均已配备并可使用。提供概述回收要求的事故前计划。与上级总部、相邻和受支持的单位以及下属单位建立了通信和数字连接; Â 并且信息正在按照更高总部的要求传递。此任务的某些迭代应在 MOPP 4 中执行。标准:单位的 DART 人员根据命令、ATP 3-04.13 和其他适用出版物、法规和技术手册 (TM) 中指定的时间表,按照批准机构的授权执行坠毁飞机(地面或空中)恢复或飞机销毁;单位标准操作程序 (SOP);事故前计划;和指挥指导。DART 评估员确定可以进行快速修复,从而允许通过一次性撤离任务进行自行恢复。当无法进行一次性撤离任务时,飞机将被回收(地面或空中)或撤离到单位维护收集点 (UMCP) 或最近的维护设施。如果飞机被遗弃,则对其进行消毒或拆卸并就地销毁,以防止被敌军利用。该部队向上级总部报告准确及时的信息。领导者注意:使用部队授权的组织和设备修改表 (MTOE) 来确定执行此任务所需的关键领导者。在任务评估期间,记录在目标任务评估标准矩阵中参加培训/授权的领导者百分比。MTOE 授权的关键领导者包括指挥官、执行官、参谋科/分队/团队军官、排长、指挥军士长、一级军士、排军士、科军士和团队领导。实弹射击:否