XiaoMi-AI文件搜索系统
World File Search System磁带驱动器

Xitanium圆形高湾LED驱动器
本文提供的信息如有更改,恕不另行通知。表示对本文所包含的信息的准确性或完整性不给予任何陈述或保证,也不对依赖任何诉讼的责任承担任何责任。本文档中提供的信息不打算作为任何商业报价,也不构成任何报价或合同的一部分,除非含义另有同意。


NSD5604 / NSD5604N - 4 通道低侧驱动器
NSD5604 / NSD5604N 是一款 4 通道低侧驱动器,适用于工业和汽车应用,包括可编程逻辑控制、通用继电器或其他电磁阀驱动器。该设备包括 4 个并行输入接口,可控制 4 个独立驱动输出,用于电阻、电感或电容负载。输出通道可以并联,以支持高电流负载并降低设备功耗。低侧输出具有过温和短路保护。集成二极管可钳位电感负载关闭期间产生的电压瞬变;结合不同的外部 TVS 连接拓扑,可实现慢衰减或快衰减关闭。NSD5604 还具有额外的 5V 最大 20mA LDO 输出,用于板载数字隔离器或光耦合器电源。 NSD5604 和 NSD5604N 均采用紧凑型 16 引脚、4.96mm x 6.4mm HTSSOP16 封装,规定工作温度范围为 -40 至 125°C。
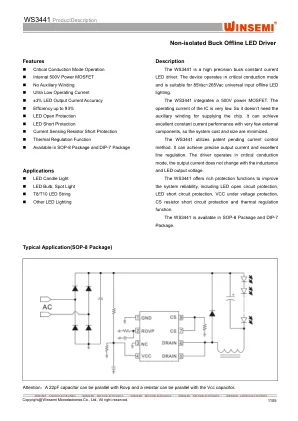
非隔离降压离线 LED 驱动器
注意:1.我们强烈建议客户在购买我们的产品时仔细检查商标,如果有任何问题,请随时与我们联系。2.电路设计时请不要超过设备的绝对最大额定值。3.Winsemi Microelectronics Co., Ltd 保留对本规格书进行更改的权利,如有更改,恕不另行通知。

56F80x 旋转变压器驱动器和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。然而,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)中运行的方式进行设计。
56F80x 旋转变压器驱动器和硬件接口
旋转变压器驱动器利用 56F80x 的两个 ADC 通道和一个定时器。在此特定应用中,必须将 ADC 通道配置为同时采样正弦和余弦信号。定时器提供方波信号的生成。该信号进一步由外部硬件调节为便于激励旋转变压器的形式。控制器根据旋转变压器测量的正弦和余弦信号估计转子轴的实际角度。然而,控制器不仅专用于实现 R/D 转换,因此旋转变压器的软件驱动程序必须以能够链接并在现有应用程序(例如 PMSM 矢量控制应用程序)中运行的方式进行设计。
保时捷设计移动驱动器Mac-数据表
操作环境和其他因素,例如选择的界面和磁盘容量。指的是驱动能力,一千千兆字节或GB等于十亿个字节和一个TByte或TB等于10亿字节。您的计算机的操作系统可能使用不同的测量标准并报告较低的容量。此外,一些列出的容量用于格式和其他功能,并且将无法用于数据存储。遵守所有适用的版权法是用户的责任。Seagate保留更改的权利,而无需
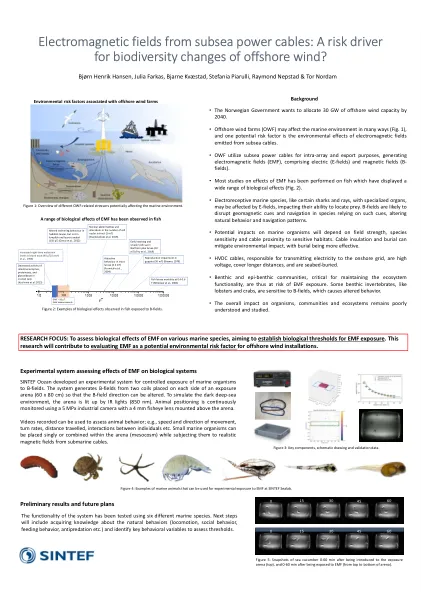
subsea电源电缆的电磁场:风险驱动器
Sintef Ocean开发了一种实验系统,用于控制海洋生物在B场上的暴露。系统从位于曝光舞台的每一侧的两个线圈(60 x 80 cm)中产生B场,以便可以改变B场方向。为了模拟深海环境,竞技场被IR灯(850 nm)点亮。动物定位是使用5 MPX工业摄像头连续监测的,其竞技场上方安装了4毫米鱼眼镜头。

基于神经肌肉的驱动器转向行为建模...
©作者2024。开放访问。本文是根据Creative Commons归因4.0国际许可证的许可,该许可允许以任何媒介或格式的使用,共享,适应,分发和复制,只要您适当地归功于原始作者和来源,就可以提供与Creative Commons许可证的链接,并指出是否进行了更改。本文中的图像或其他第三方材料包含在文章的创意共享许可中,除非在信用额度中另有说明。如果本文的创意共享许可中未包含材料,并且您的预期用途不受法定法规的允许或超过允许的用途,则您需要直接从版权所有者那里获得许可。要查看此许可证的副本,请访问http://creativecommons.org/licenses/4.0/。
双重可逆电动机驱动器MB3863 -SM0VPO
切换控制模式A或B对Q2和Q3或Q1和Q4,同时逆转每个开关的电机电源电流。当使用Q2和Q3时,B-OUT和A-OUT分别是高水平和低水平。在这种情况下,电流会流动b-out→电动机→A-out,如下表所述导致向前操作。使用Q1和Q4时,电流向上流向上述流动,从而导致反向电动机操作。