XiaoMi-AI文件搜索系统
World File Search System磁罗盘
商船通函第 138 号 - 巴拿马船舶登记处
商船通函编号138 致:船舶所有人、船舶修理工、船长、值班人员、罗盘制造商和罗盘调整员。主题:磁罗盘 参考:法令编号7、SOLAS 74 修正案、IMO 决议 A.382(X)、决议 A.694(17)、决议 A.813(19) 和决议 MSC.86(70)、法令编号 45。本商船通函旨在制定维护和测试磁罗盘的指南。1.适用范围。1.这些指南适用于所有船舶,无论其大小和航行区域如何。2.要求。1.1974 年《国际海上人命安全公约》(SOLAS)2000 年修正案第 V 章第 19 条要求配备磁罗盘。磁罗盘必须符合本组织制定的标准。3.维护责任。1.船东/经营者和船长有责任确保其船上的罗盘按照本组织制定的标准保持良好的工作状态。4.何时调整罗盘。1.下列情况下应调整磁罗盘:a) 首次安装或更换 b) 变得不可靠,c) 船舶进行可能影响其永久磁性和感应磁性的结构维修或改造,d) 添加、移除或改造靠近罗盘的电磁设备,e) 自上次调整之日起已过去最多一 (1) 年,且罗盘偏差记录未得到妥善保存或偏差记录过多或罗盘出现物理缺陷,f) 考虑到地点和使用方法的变化,偏差超过五 (5) 度。
商船通函第 138 号 - 巴拿马船舶登记处
本商船通函旨在制定维护和测试磁罗盘的指南。1.适用范围。1.这些指南适用于所有船舶,无论其大小和航行区域如何。2.要求。1.根据 1974 年《国际海上人命安全公约》(SOLAS)2000 年修正案第 V 章第 19 条,必须配备磁罗盘。磁罗盘必须符合本组织制定的标准。3.维护责任。1.船东/经营者和船长有责任确保其船上的罗盘按照本组织制定的标准保持良好的工作状态。4.何时调整罗盘。1.下列情况下应调整磁罗盘: a) 首次安装或更换 b) 变得不可靠, c) 船舶进行可能影响其永久磁性和感应磁性的结构维修或改造, d) 增加、移除或改造靠近罗盘的电磁设备, e) 自上次调整之日起已过最多一 (1) 年,并且罗盘偏差记录未得到妥善保存或偏差记录过多或罗盘显示物理缺陷, f) 考虑到使用的位置和方法的变化,偏差超过五 (5) 度。
数字孪生和数字线程的必要性
液压;刹车、襟翼、扰流板、方向舵、副翼、起落架泵 重量传感器 - 起落架 涡轮机;转速 (N1/N2)、进气口 - 涡轮压力、温度、燃油燃烧 电压表;驾驶舱、主总线、客舱、辅助电源、货物、发动机、APU 发电机仪表(发动机、APU) 电力负荷(安培/小时);驾驶舱、客舱、货物 火灾传感器;客舱、货物、发动机、燃油、刹车、电子设备舱 二氧化碳;客舱、货物 磁罗盘 GPS(卫星 / 地面) 无线电罗盘 (NDB) 多普勒雷达;天气、闪电、下沉气流(微下击暴流)

faa.gov/cak 出发前须知
跑道 19 入口偏移 601',与跑道 J 重合。 飞行员应尽快离开跑道进入可用的跑道。 除非 TWR 指示您这样做,否则请勿离开交叉跑道。 始终确认您的磁罗盘与相应的跑道航向对齐,以确保您能看到正确的地面。 TWR 可能会对交叉跑道进行模式和练习进近。 可以使用高于跑道 500' 的受限低空进近来与在交叉跑道上降落的其他飞机保持距离。 从西边接近机场时要小心,因为可能会错误识别地面。TWY K 曾经是一条 RWY,从西边看可能像是一条 RWY。
摘要 本培训手册为海军和海军预备役人员准备,介绍了眼镜店使用的理论和实践技能。结合镜子、棱镜、透镜和基本光学系统分析了光学理论。在学习机械设计和构造基础知识后,学习了维护程序,以便获得光学维修的一般知识。特别介绍了望远镜、望远镜、磁罗盘、方位角和方位角圈、六分仪、测距仪、望远镜、双筒望远镜、潜艇潜望镜和夜视瞄准器等仪器。为了给读者提供足够的背景知识,还讨论了车床、磨床、……铣床和钻床的操作。除了用于解释目的的插图外,还提供了有关光学零件结构的信息。 (CC)
摘要 本培训手册为海军和海军预备役人员准备,介绍了光学商店使用的理论和实践技能。结合镜子、棱镜、透镜和基本光学系统分析光学理论。系统。遵循机械设计和构造的基础知识,研究维护程序,以提供一般的知识。光学维修。 特别的。描述了诸如望远镜、望远镜、磁罗盘、方位角和水平仪、六分仪、测距仪、望远镜、双筒望远镜、潜艇潜望镜和夜视瞄准器之类的仪器。为了给读者提供足够的背景知识,还讨论了车床、磨床、铣床和钻床的操作。除了用于解释目的的插图外,还提供了有关光学Mara评级结构的信息。(CC)
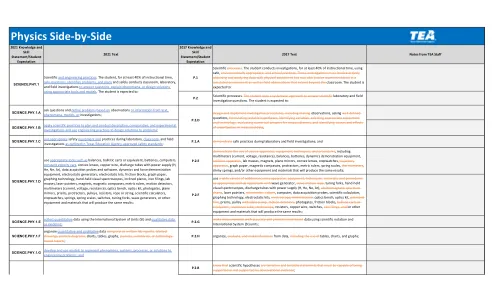
2017-2021-物理-科学-teks-并排.pdf
恒速汽车、凸透镜、铜线、带电源的放电管(H、He、Ne、Ar)、数据采集探头和软件、动力学和力演示设备、静电发生器、静电套件、摩擦块、方格纸、绘图技术、手持式视觉光谱仪、斜面、铁屑、实验室质量、激光笔、磁铁、磁罗盘、公制尺、运动探测器、万用表(电流、电压、电阻)、光学台、光学套件、光电门、平面镜、棱镜、量角器、滑轮、电阻器、绳索或细绳、科学计算器、秒表、弹簧、弹簧秤、开关、音叉、波发生器或其他可产生相同结果的设备和材料;
光学理论和实践技能... - ERIC
摘要 本培训手册为海军和海军预备役人员准备,介绍了光学商店使用的理论和实践技能。结合镜子、棱镜、透镜和基本光学系统分析光学理论。系统。遵循机械设计和构造的基础知识,研究维护程序,以提供一般的知识。光学维修。 特别的。描述了诸如望远镜、望远镜、磁罗盘、方位角和水平仪、六分仪、测距仪、望远镜、双筒望远镜、潜艇潜望镜和夜视瞄准器之类的仪器。为了给读者提供足够的背景知识,还讨论了车床、磨床、铣床和钻床的操作。除了用于解释目的的插图外,还提供了有关光学Mara评级结构的信息。(CC)

DIFAR 定位系统的准确度和精确度
蓝鲸的被动声学定位一直是南极蓝鲸研究的重要组成部分,并可能成为未来作为南大洋研究伙伴关系南极蓝鲸项目一部分进行的研究的关键工具。本文件介绍了测量基于声纳浮标的定位系统的准确度和精确度的方法。这些方法可用于在实时跟踪鲸鱼的过程中现场“校准”每个声纳浮标中的磁罗盘。在这里,我们比较了使用不同仪器在不同航行中收集的几个不同数据集的定位准确度和精确度。本文件还包括有关声纳浮标定位系统各个组件校准的其他信息,并就未来开发和部署基于声纳浮标的鲸鱼被动声学定位系统提供建议。

移动机器人定位:传感器和技术
准确了解车辆的位置是移动机器人应用中的一个基本问题。为了寻找解决方案,研究人员和工程师开发了各种用于移动机器人定位的系统、传感器和技术。本文回顾了相关的移动机器人定位技术。本文定义了七种定位系统类别:(1)里程表,(2)惯性导航,(3)磁罗盘,(4)主动信标,(5)全球定位系统,(6)地标导航和(7)模型匹配。本文讨论了每个类别的特点,并为每个类别给出了现有技术的示例。移动机器人导航领域活跃而充满活力,更多优秀的系统和想法正在不断开发中。因此,本文中提供的示例仅代表其各自的类别,并不代表作者的判断。文献中可以找到许多巧妙的方法,但出于简洁的原因,本文无法引用所有方法。 1997 John Wiley & Sons, Inc.