XiaoMi-AI文件搜索系统
World File Search System离散时间

开放边界驱动量子电路的可积性
在本文中,我们讨论了具有开放边界条件的量子比特(自旋 1/2)双量子电路的杨-巴克斯特可积性问题,其中两个电路复制品仅在左边界或右边界耦合。我们研究了体积由自由费米子 XX 类型或相互作用 XXZ 类型的基本六顶点幺正门给出的情况。通过使用 Sklyanin 的反射代数构造,我们获得了此类设置的边界杨-巴克斯特方程的最一般解。我们使用此解从转移矩阵形式构建具有两步离散时间 Floquet(又名砖砌)动力学的可积电路。我们证明,只有当体积是自由模型时,边界矩阵通常才是不可分解的,并且对于特定的自由参数选择会产生具有两个链之间边界相互作用的非平凡幺正动力学。然后,我们考虑连续时间演化的极限,并在 Lindbladian 设置中给出一组受限边界项的解释。具体来说,对于特定的自由参数选择,解对应于开放量子系统动力学,源项表示从自旋链边界注入或移除粒子。

使用神经网络的定量验证 - 滴
我们提出了一种数据驱动的方法,用于概率程序和随机动力学模型的定量验证。我们的方法利用神经网络计算紧密和声音的边界,以使随机过程在有限的时间内达到目标状况的可能性。此问题涵盖了各种定量验证问题,从离散时间随机动力学模型的可及性和安全性分析到对概率计划的断言和末端分析的研究。我们依靠神经网络代表产生这种概率界限的超级智能证书,我们使用反例引导的电感综合循环对其进行计算:我们在使用随机优化的状态限制的概率上训练神经证书,然后使用随机优化的状态进行拧紧的概率,然后我们正式使用所有可能的状态,使用所有可能的状态使用满足性模量,以实现证书的有效性;如果我们收到反例,我们将其添加到我们的样本集中,然后重复循环,直到确认有效性。我们在各种基准基准上证明,由于神经网络的表达能力,我们的方法比现有的符号方法在所有情况下都产生的概率范围更小或可比,并且我们的方法在模型上完全取得了成功,这些模型完全超出了此类替代技术的范围。

通过连续时间选择均值 - 变化投资组合...
强化学习(RL)是机器学习中的一个活跃子区域,已成功应用于解决复杂的决策问题,例如玩棋盘游戏[31,32]和视频游戏[22] [22],自主驾驶[18,21],以及最近,将大型语言模型和文本生成模型与人类的preference preferfection and-to anclight [18,21]。RL研究主要集中在离散时间和空间中的马尔可夫决策过程(MDP)上。有关MDP的理论和应用的详细说明,请参见[34]。Wang,Zariphopoulou和Zhou [40]是第一个使用受控扩散过程的RL制定和开发RL的熵调查的,探索性控制框架的人,该过程固有地与连续状态空间和可能的连续作用(可能连续的动作(控制)空间)。在此框架中,随机放松控制被用来表示探索,从而捕获了RL核心的“反复试验”概念。随后的工作旨在通过Martingale方法[14、15、16]和政策优化在连续时间内为无模型RL奠定理论基础[44]。在这里,“无模型”是指潜在的动力学是扩散过程,但是它们的系数以及奖励函数是未知的。[14,15,16]的关键见解是,可以从基于连续时间RL的Martingale结构中得出学习目标。这些论文中的理论结果自然会导致一般RL任务的各种“无模型”算法,因为它们直接直接学习最佳策略而无需尝试学习/估计模型参数。这些算法中的许多算法恢复了通常以启发式方式提出的MDP的现有RL算法。然而,对MDP的RL研究占据了中心阶段的算法的融合和遗憾分析仍然缺乏扩散率。To our best knowledge, the only works that carry out a model-free convergence analysis and derive sublinear regrets are [12] for a class of stochastic linear–quadratic (LQ) control problems and [11] for continuous-time mean–variance portfolio selection, both of which apply/apapt the policy gradient algorithms developed in [15] and exploit heavily the special structures of the problems.本文的目的是通过对[16]中引入的(小)Q学习的定量分析以及通常非线性RL问题的相关算法来填补这一空白。(big)Q-学习是离散时间MDP RL的关键方法,但Q功能在连续的时间内崩溃,因为它不再依赖于时间步长无限时间小时的操作。[16]提出了Q功能的概念,Q功能是Q功能在时间离散化方面的第一阶导数。
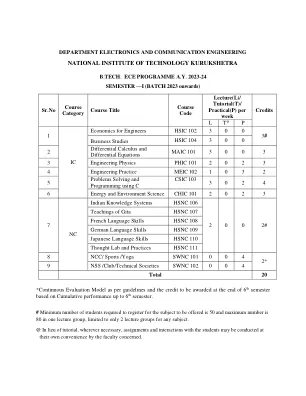
部门电子和通信工程
课程类型PC课程学习目标,以了解离散变换,离散时间系统的实现,FIR滤波器的设计,IIR过滤器的设计。课程内容单元i z变换:z-变换及其属性,极点和零,Z-Transform的反转,单方面的Z传输和微分方程的解决方案。分析Z-域,因果关系,稳定性,Z变换和傅立叶变换之间的关系的分析。频率选择性过滤器;所有通过过滤器,最小相,最大相和混合相系统。II单元DFT和FFT:频域采样和DFT,线性变换,与其他变换的关系,DFT的属性,使用DFT的线性滤波,使用DFT,Radix 2&Radix-4 FFT算法对信号进行频率分析,Goertzel算法,Goertzel算法,FFT AlgorithM的应用,fft Algorithm的应用,计算dft的fft Algorithm compore sequecentions dft of Realte of Realte seque of Realte seque of Realte seque。第三单元的实施离散时间系统:直接形式,级联形式,频率采样和FIR系统的晶格结构。直接形式,转置形式,级联形式平行形式。IIR系统的晶格和晶格梯子结构。 状态空间结构。 过滤器的IV单元设计:实用频率选择性过滤器的特征。 过滤设计规格峰通过带纹波,最小停止频段衰减。 使用Windows的FIR过滤器设计四种类型的FIR滤波器。 kaiser窗口方法比较FIR过滤器的设计方法Gibbs现象,频率采样方法的FIR滤波器设计,最佳equiripple fir滤波器的设计,交替定理。IIR系统的晶格和晶格梯子结构。状态空间结构。过滤器的IV单元设计:实用频率选择性过滤器的特征。过滤设计规格峰通过带纹波,最小停止频段衰减。使用Windows的FIR过滤器设计四种类型的FIR滤波器。kaiser窗口方法比较FIR过滤器的设计方法Gibbs现象,频率采样方法的FIR滤波器设计,最佳equiripple fir滤波器的设计,交替定理。来自模拟过滤器的IIR过滤器的设计,通过衍生物的近似设计,脉冲不变方法双线性转换方法的特征,Chebyshev和Chebyshev和椭圆形模拟过滤器和IIR滤波器的设计,频率转换。

teerthanker Mahaveer University
电路:电路元素,网络图,Kirchhoff定律,网格和节点分析,网络定理和应用,自然响应和强制响应,瞬态响应以及对任意输入,共振,基本过滤器概念的暂时响应以及稳态响应;网络的理想当前和电压源在极点和零方面的属性,传输函数,共振电路,三个相路,两端口网络,两元素网络合成的元素,三个相路。信号和系统:连续和离散时间信号的表示;移动和缩放操作;线性,时间不变和因果系统;连续周期性信号的傅立叶级数表示;采样定理;傅立叶,拉普拉斯和Z变换。电机:电路电路,电动机的分析和设计 - 等效电路,相图图,测试,调节和效率;三相变压器连接,并行操作;自动转换器;转换原则; DC机器 - 类型,绕组,发电机特性,电枢反应和换向,电动机的启动和速度控制;三相感应电动机 - 原理,类型,性能特征,起始和速度控制;单相感应电动机;
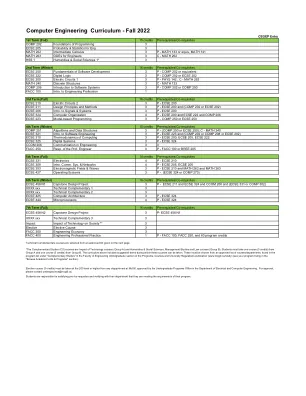
计算机工程课程 - 2022 年秋季
学分 先决条件/共同条件 ECSE 307 线性系统与控制 4 P - ECSE 206、ECSE 210 ECSE 335 微电子学 4 P - ECSE 331 ECSE 403 控制 4 P - ECSE 307 ECSE 408 通信系统 4 P - ECSE 205、ECSE 308 ECSE 412 离散时间信号处理 3 P - ECSE 206 ECSE 415 计算机视觉简介 3 P - ECSE 205、(ECSE 206 或 ECSE 316) ECSE 416 电信。网络 4 P - (ECSE 250 或 COMP 250)和 ECSE 205 和(ECSE 308 或 ECSE 316)ECSE 420 并行计算 3 P - ECSE 427 ECSE 422 容错计算 3 P - ECSE 324 和(ECSE 250 或 COMP 250)ECSE 428 软件工程实践 3 P - (ECSE 321 或 COMP 335)ECSE 435 混合信号测试技术 3 P - ECSE 206,ECSE 335 ECSE 439 软件语言工程 3 P - (ECSE 321 或 COMP 303)ECSE 508 多智能体系统 3 P - ECSE 205 或同等学历 ECSE 510 随机系统的过滤和预测 3 P - ECSE 500,ECSE 509 或同等学历ECSE 544 计算摄影 4 P - ECSE 205,ECSE 206

用Lyapunov屏障证书正式验证深钢筋学习控制器
摘要 - 深处增强学习(DRL)是一种强大的机器学习范式,用于生成控制自主系统的代理。但是,DRL代理的“黑匣子”性质限制了其在现实世界中关键应用程序中的部署。为代理行为提供强大保证的一种有前途的方法是使用神经Lyapunov屏障(NLB)证书,该证书是通过系统中学的功能,其属性间接地暗示着代理的行为。但是,基于NLB的证书通常很难学习,甚至更难验证,尤其是对于复杂的系统。在这项工作中,我们提出了一种新颖的方法,用于培训和验证基于NLB的离散时间系统证书。具体来说,我们引入了一种证书组成的技术,该技术通过策略性地设计一系列证书来简化高度复杂系统的验证。当通过神经网络验证引擎共同验证时,这些证书提供了正式的保证,即DRL代理都实现了其目标并避免了不安全的行为。此外,我们引入了一种用于证书过滤的技术,该技术大大简化了生成正式验证的证书的过程。我们通过案例研究证明了我们的方法的优点,该案例研究为DRL控制的航天器提供了安全性和livesice保证。
![arxiv:2307.11027v2 [Quant-ph] 2023年12月7日](/simg/0\075f7cb9369485d6514b739019836aee332e1780.webp)
arxiv:2307.11027v2 [Quant-ph] 2023年12月7日
近年来,量子计算[1,2]已成为物理发展发展的最前沿,并有望最终能够比在古典计算机上更有效地执行某些计算[3-5]。这激发了多年来创建许多众所周知的量子算法,以利用这种计算加速,例如Shor的算法[6]和Grover的算法[7]。随着量子计算的发展,量子步行[8,9]也越来越多。在很大程度上,这是由于它们应用于量子算法[10-13]。量子步行有两种主要类型,连续时间和离散时间。在这项工作中,我们专注于离散时间量子步行(DTQW),特别是在周期图上的DTQW [14],因为它在数字量子计算机上执行时具有方便的编码。但是,当前的硬件具有显着的缺陷。我们在这项工作中的目标是确定在周期图上运行DTQW需要改进多少IBM处理器。本文结构如下。在第二节中,使用二进制编码提出了周期离散时间量子步行的实现。在第三节中,我们在8节点量子步行的八个步骤中执行该算法的结果,然后在IBM量子设备上进行4节点量子步行的四个步骤,称为IBMQ

电气和计算机工程(ECE)
ECE3111。系统分析和设计。(4个学分)使用频率和时间域方法对控制系统进行建模,分析和设计。微分方程,传输函数,信号流图和连续和离散时间系统的状态变量表示。非线性系统的线性化。二阶系统的瞬态和频率响应。线性系统具有反馈的稳定性; Routh Hurwitz,根源基因座,Bode和Nyquist方法。 可控性和可观察性。 用于分析线性系统的计算方法。 基于团队的设计项目涉及建模,经典补偿器设计和状态可变反馈设计。 注册要求:ECE 3101或BME 3400;数学2210Q,可以同时进行。 仅向工程学院的学生开放。 查看类(https://catalog.uconn.edu/course-search/? 详细信息和代码= ECE%203111)线性系统具有反馈的稳定性; Routh Hurwitz,根源基因座,Bode和Nyquist方法。可控性和可观察性。用于分析线性系统的计算方法。基于团队的设计项目涉及建模,经典补偿器设计和状态可变反馈设计。注册要求:ECE 3101或BME 3400;数学2210Q,可以同时进行。仅向工程学院的学生开放。查看类(https://catalog.uconn.edu/course-search/?详细信息和代码= ECE%203111)

使用神经网络进行定量验证
我们提出了一种数据驱动的方法,用于概率程序和随机动力学模型的定量验证。我们的方法利用神经网络计算紧密和声音的边界,以使随机过程在有限的时间内达到目标状况的可能性。此问题涵盖了各种定量验证问题,从离散时间随机动力学模型的可及性和安全性分析到对概率计划的断言和末端分析的研究。我们依靠神经网络代表产生这种概率界限的超级智能证书,我们使用反例引导的电感综合循环对其进行计算:我们在使用随机优化的状态限制的概率上训练神经证书,然后使用随机优化的状态进行拧紧的概率,然后我们正式使用所有可能的状态,使用所有可能的状态使用满足性模量,以实现证书的有效性;如果我们收到反例,我们将其添加到我们的样本集中,然后重复循环,直到确认有效性。我们在各种基准基准上证明,由于神经网络的表达能力,我们的方法比现有的符号方法在所有情况下都产生的概率范围更小或可比,并且我们的方法在模型上完全取得了成功,这些模型完全超出了此类替代技术的范围。