XiaoMi-AI文件搜索系统
World File Search System离散时间

由非reciprocal光学力驱动的连续时空晶体状态
我们表明,通过光辐射压力通过非保守耦合,可以在线性振荡器的集合中产生连续的时间晶体状态。这种新机制全面地解释了用光照明的一系列纳米线中的时间晶体状态的观察结果[nat。物理。19,986(2023)]。与非线性同步方案根本不同,它与广泛的相互作用多体系统有关,包括化学,生物学,天气和纳米级物质领域。时间晶体 - 一种具有自发损坏的时间翻译对称性的物质状态,从理论上讲是十多年前的[1-4]。随后理解,自然禁止在封闭系统中破坏连续的时间翻译对称性[5]。然而,具有断裂的离散时间翻译对称性的时间晶体,其中外部周期力以下和谐频率自发振荡,已经在各种捕获的离子和原子,固态旋转和超导二极管系统中实现了实验[4]。打破连续时间翻译对称性的开放系统更加紧密地意识到原始建议的精神,并代表了一种新的物质状态。连续时间晶体是一个多体系统,其中连续的时间翻译对称性自发地分解为周期性运动,以响应于任意弱的扰动,这是通过一阶,超高的破坏相变(将其与经典振荡现象区分开来)。在少数kelvin温度下的半导体非线性电子核自旋系统的缓慢振荡动力学中看到了这种行为[6];在室温下的雷德伯格气体强烈相互作用中[7];并在光学腔中的光学泵送耗散性玻璃体冷凝物中[8]。在后者中,时间周期性的光发射和空间周期性的原子密度自发出现,因此系统构成了连续的时空晶体。
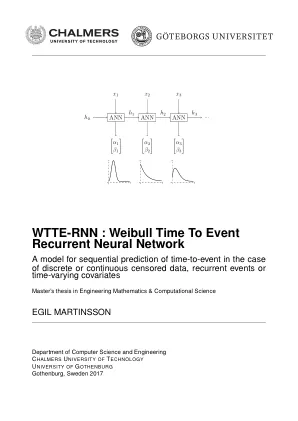
WTTE-RNN:威布尔事件时间递归神经网络
在本论文中,我们提出了一种预测事件发生时间的新模型:威布尔事件时间 RNN。这是一个用于预测下一个事件发生时间的时间序列的简单框架,适用于我们遇到连续或离散时间、右删失、重复事件、时间模式、随时间变化的协变量或不同长度的时间序列中的任何一个或所有问题时。所有这些问题在客户流失、剩余使用寿命、故障、尖峰训练和事件预测中经常遇到。所提出的模型估计下一个事件发生时间的分布具有离散或连续威布尔分布,其参数是递归神经网络的输出。该模型使用生存分析中常用的特殊目标函数(删失数据的对数似然损失)进行训练。威布尔分布足够简单,可以避免稀疏性,并且可以轻松地进行正则化以避免过度拟合,但仍然具有足够的表现力来编码诸如增加、平稳或减少风险等概念,并且可以在允许的情况下收敛到点估计。预测的威布尔参数可用于预测下一个事件时间的预期值和分位数。它还导致未来风险的自然 2d 嵌入,可用于监控和探索性分析。我们使用通用的审查数据框架来描述 WTTE-RNN,该框架可以轻松地与其他分布一起扩展并适用于多变量预测。我们表明,常见的比例风险模型和威布尔加速故障时间模型是 WTTE-RNN 的特殊情况。所提出的模型在具有不同程度的审查和时间分辨率的模拟数据上进行了评估。我们将其与二元固定窗口预测模型和处理审查数据的简单方法进行了比较。该模型优于简单方法,并且被发现具有许多优势和与二元固定窗口 RNN 相当的性能,而无需指定窗口大小和在更多数据上进行训练的能力。应用于 CMAPSS 数据集以进行模拟喷气发动机的 PHM 运行至故障得到了有希望的结果。
WTTE-RNN:威布尔事件时间循环神经网络
在本文中,我们提出了一种预测事件发生时间的新模型:威布尔事件时间 RNN。这是一个用于预测下一个事件发生时间的时间序列的简单框架,适用于我们遇到连续或离散时间、右删失、重复事件、时间模式、随时间变化的协变量或不同长度的时间序列中的任何一个或所有问题。所有这些问题在客户流失、剩余使用寿命、故障、尖峰序列和事件预测中经常遇到。所提出的模型估计下一个事件发生时间的分布具有离散或连续威布尔分布,其参数是递归神经网络的输出。该模型使用生存分析中常用的特殊目标函数(删失数据的对数似然损失)进行训练。威布尔分布足够简单,可以避免稀疏性,并且可以轻松进行正则化以避免过度拟合,但仍然具有足够的表现力来编码诸如增加、平稳或减少风险之类的概念,并且如果允许的话可以收敛到点估计。预测的威布尔参数可用于预测下一个事件发生时间的预期值和分位数。它还会导致未来风险的自然 2d 嵌入,可用于监测和探索性分析。我们使用一个通用的删失数据框架来描述 WTTE-RNN,该框架可以轻松地与其他分布一起扩展并适用于多变量预测。我们表明,常见的比例风险模型和威布尔加速故障时间模型是 WTTE-RNN 的特殊情况。对具有不同程度删失和时间分辨率的模拟数据评估了所提出的模型。我们将它与二元固定窗口预测模型和处理删失数据的简单方法进行了比较。该模型优于简单方法,并且被发现具有许多优点和与二元固定窗口 RNN 相当的性能,而无需指定窗口大小和在更多数据上训练的能力。将 CMAPSS 数据集应用于模拟喷气发动机的 PHM 运行至故障得到了有希望的结果。

2020/2021课程 - 计算机工程< / div>
ECSE 307 Linear Systems & Control (4 cr, P - ECSE 206, ECSE 210) ECSE 335 Microelectronics (4 cr, P - ECSE 331) ECSE 343 Numerical Methods in Engineering (3 cr, P- ECSE 205, COMP 250, MATH 263) ECSE 403 Control (4 cr, P - ECSE 307) ECSE 408 Communication Systems (4 cr, P - ECSE 205, ECSE 308)ECSE 412离散时间信号处理(3 CR,P -ECSE 206)ECSE 415简介。计算机视觉(3 CR,P -ECSE 205,ECSE 206或ECSE 316)ECSE 416 TELECOM。计算机视觉(3 CR,P -ECSE 205,ECSE 206或ECSE 316)ECSE 416 TELECOM。网络(4 CR,P -ECSE 205,ECSE 308或ECSE 316,COMP 250)ECSE 420并行计算(3 Cr,P -ECSE 427)ECSE 422容错计算(3 CR,P -ECSE 324,COMP 250,COMP 250,COMP 250)ECSE 428软件工程实践(3 Cr,P -ecse 335)ECSE 335) ECSE 321或COMP 303)ECSE 435混合信号测试技术(3 CR,P -ECSE 206,ECSE 335)ECSE 436信号处理硬件(3 Cr,P -ECSE 206,ECSE 324,ECSE 324,ECSE 325,ECSE 325)ECSE 437软件交付303)ECSE 446现实图像合成(3 CR,P -ECSE 202,ECSE 205,COMP 250)ECSE 450电磁兼容性(3 Cr,P -ECSE 222,ECSE 331,ECSE 331,ECSE 353或ECSE 353或ECSE 354或ECSE 354) 353) ECSE 501 Linear Systems (3 cr, C - ECSE 500 or permission from the instructor) ECSE 508 Multi-Agent Systems (3 cr, P - ECSE 205 or equivalents) ECSE 510 Filtering & Prediction for Stochastic Systems (3 cr, P - ECSE 500, ECSE 509 oe equivalents) ECSE 516 Nonlinear and Hybrid Control Systems (3 cr, P - ECSE 500 and ECSE 501 or等效物)ECSE 544计算摄影(4 CR,P -ECSE 205和ECSE 206)ECSE 551*工程师的机器学习(4 Cr -P -P -comp 250和ESCE 205或MATH 323; c- ESCE 443或ESCE 543或数学247)
遥测系统的测试方法和子系统第 1 卷...
图 6-3a。用于验证 IRIG 时间码准确性的基于 PC 的测试设置。...................................... 6-12 图 7-1。单个 CAIS 总线配置。......................................................................... 7-2 图 7-2。分离 CAIS 总线配置。......................................................................... 7-2 图 7-3。配置检查流程图 (1/2)。............................................................. 7-4 图 7-4。配置检查流程图 (2 / 2)。......................................................... 7-5 图 B-1。热瞬态测试设备。............................................................................. B-2 图 B-2。底座。................................................................................................................ B-3 图 B-3。传感器固定装置支架。................................................................................ B-4 图 B-4。传感器固定装置(黄铜)。................................................................................ B-5 图 B-5。玻璃固定环。............................................................................................. B-6 图 B-6。传感器安装插头。............................................................................................. B-7 图 B-7。闪光灯滑块。............................................................................................. B-8 图 B-8。灯架(大)。......................................................................................... B-9 图 B-9。灯架(小)。.................................................................................... B-10 图 B-10。使用开槽旋转盘和相当于测量应用的热源对传感器进行瞬态热冲击测试的测试设置。.................... B-15 图 C-1。发射器 RF 包络。................................................................................. C-1 图 C-2。晶体探测器输出。.................................................................................... C-1 图 C-3。幅度调制。......................................................................................... C-2 图 D-1。测量值和计算值。...................................................................... D-2 图 E-1。GUI 控制窗口。......................................................................................... E-6 图 E-2。文件浏览器窗口。...................................................................................... E-6 图 E-3。对话框:载波跟踪滤波器。.................................................................... E-7 图 E-4。对话框:符号跟踪滤波器。.................................................................. E-8 图 E-5。外部/接收器/眼图。外部、离散时间散点图。................................................................ E-10 图 E-6。................................................................. E-10 图 E-7。循环同步进度。......................................................................... E-10 图 E-8。表格分析摘要。............................................................................. E-11 图 E-9。图形分析控制窗口。......................................................................... E-11 图 E-10。假锁定眼图。.................................................................................... E-13 图 E-11。假锁定星座。................................................................................. E-13 图 E-12。数据采集设备。................................................................................ E-16 图 F-1。分析仪结构。.............................................................................................. F-3 图 F-2。参考功率谱。......................................................................................... F-4 图 F-3。星座图。............................................................................................. F-5 图 F-4。检测滤波器。......................................................................................... F-6 图 F-5。发射机测试设备。.......................... F-13 图 F-7。................................................................................ F-6 图 F-6。参考信号的比特间隔载波相位轨迹。发射机性能摘要。................................................................ F-15 图 F-8。使用差分编码预测的检测性能。.......................... F-15 图 F-9。基带频谱。................................................................................ F-16 图 F-10。在发射机 RF 端口测量的 OQPSK 星座。................................. F-16 图 F-11。决策样本直方图。................................................................................ F-17 图 F-12。在发射机 RF 端口测量的 OQPSK 星座。................................. F-17 图 F-13。箱间隔相位轨迹。......................................................................... F-18 图 F-14。轨迹偏差频谱。.............................................................................. F-19
电气工程硕士,专业为电力电子和……
EEE G541 配电设备和配置 [3 2 5] 消费者端配电装置的基本配置。变压器类型、规格、性能、保护和尺寸。电缆和绝缘层的类型、电缆参数、载流量和保护。低压开关设备的额定值及其在选择、开关瞬态和清除时间中的应用。保险丝的属性(以载流量为参考)。仪表、仪器变压器及其应用。配电层的电压控制。电能质量功率因数、频率和谐波含量的基本概念 EEE G542 电力电子转换器 [3 2 5] 转换器的重要性在于它是电源和负载之间的接口。DC-DC 转换器:降压、升压和降压-升压配置。ACDC 转换器:单相和三相二极管和晶闸管转换器。晶闸管转换器中的逆变和线路换向逆变器的应用。 DCAC 转换器:单相和三相开关模式电压源逆变器、不同类型的 PWM 操作、多级 VSI 操作、空间矢量调制技术。AC-AC 转换器:晶闸管供电交流负载、循环换流器。矩阵转换器阵列及其作为 DC-DC 和 DC-AC 转换器的操作。EEE G543 功率器件微电子学与选择 [ 3 0 3] 功率器件封装的热特性、R θJC 和 R θCS 的问题、热流及其对器件温度的影响、散热器设计和选择。双层结行为、漂移区的概念、功率二极管的特性。厚膜 BJT 中的基极操作、稳态特性、开启和关闭时间、多级功率达林顿。四层结行为、晶闸管的两个晶体管模型、四层结器件的动态模型。GTO 晶闸管、四层结器件的关闭机制、当前的技术问题。 MOS 的工作原理和特性、功率 MOSFET 的特性和结构。MOSFET 到 IGBT 的发展、技术优势、特性和动态行为。绝缘栅技术的当前技术问题。矩阵转换器简介。EEE G545 电力电子系统控制与仪表 [3 0 3] 参考电力电子转换器的调节和控制问题。反馈转换器模型:基本转换器动态、快速切换、分段线性模型、离散时间模型。DC-DC 转换器的电压模式和电流模式控制、整流器系统的比较器控制、比例和比例积分控制应用。基于线性化的控制设计:传递函数、补偿和滤波、补偿反馈控制系统。滞后控制基础知识以及在 DC-DC 转换器和逆变器中的应用。一般边界控制:边界附近的行为以及合适边界的选择。模糊控制技术的基本思想和性能问题。电力电子电路传感器、速度传感器和扭矩传感器。EEE G552 固态硬盘 [3 2 5] 驱动系统简介:要求、组件和基准;电机理论回顾;电机的电力电子控制:要求和操作问题;感应电机的静态速度控制:交流电源控制器、滑差能量回收、VSI 和 CSI 控制的感应电机;同步电机和相关机器的速度控制;直流电机速度控制问题:整流器和斩波控制器;先进的感应电机驱动控制:矢量控制,
![arxiv:2503.05399v1 [Math.dg] 2025年3月7日](/simg/a\a0464b922469f5b23deae1245fbc7f8b73f48891.webp)
arxiv:2503.05399v1 [Math.dg] 2025年3月7日
∂E(t)κe(t)d H 1表示E(t)曲率的平均值(t)。在物理文献中已经提出了这种类型的进化,作为使现象的模型[31,32]。像Mullins-sekerka流一样,集合E(t)的面积沿流量保存,周长不侵扰。曲率流的另一个重要特征是,它可以正式视为周长的L 2-级别流。通常,对(1.1)和(1.2)的平滑解决方案可能会在有限的时间内产生奇异性(例如,请参见[10,10,26,27])。利用所考虑的两个流的梯度流结构,可以通过最小化移动方案(在[3,25]中引入此设置),将弱解定义为(1.1)和(1.2)。此方案定义连续流的离散时间近似,通常称为离散流,具体取决于时间参数h。l 1-限速点为离散流的h→0称为平流,因此,在每次t∈[0,∞)时定义了集合e(t)的家族e(t)。在构建了这个全球范围的弱解决方案后,研究其渐近学是一个自然的问题。关于这些几何流量的解决方案的渐近行为有广泛的文献。一方面,在初始基准的各种几何假设下,一个人能够显示出(1.1)或(1.2)的平滑解决方案的全球及时存在,并表征其渐近行为。关于Mullins-Sekerka流,我们引用了[1,6,11,14],而某些对体积的平均曲率流量的参考为[4、5、5、12、9、34]。另外,人们可以直接研究离散的流量或流量,鉴于最近对所考虑的流量的弱唯一性的结果,这种观点已经获得了显着的兴趣。特别是,这些结果表明,只要存在(1.1)或(1.2)的经典解决方案,任何流动的流量就与之重合。在[13,16]中的(1.1)(在二维中)和[17]中的(1.2)中已证明这一点,在初始数据上的某些规律性假设下,另请参见[23],对于弱的唯一性,对于弱的唯一性结果,导致体积预状的弱弱概念的弱含量是平均平均曲率曲率。在平均曲率流(1.2)的欧几里得设置r 2和r 3中的情况已被很好地理解。第一个结果涉及融合向浮游向球的翻译的收敛,如[21]在n = 2,3。后来,由于具有尖锐指数的Alexandrov定理的新颖定量版本,在[29]中,作者证明了离散流向球,指数速率的收敛,没有其他翻译。随后,他们设法将这项研究扩展到[20,19]中更具挑战性的浮动案例。另请参见[22],有关平面各向异性情况的类似结果。在[20,19]中再次包含t 2中(1.1)的流量溶液的结果,假设初始基准e 0具有固定的阈值。在t 2中,这构成了初始基准e 0满意p(e 0)<2。这个问题至关重要。我们将重点放在平面,定期设置t 2上。在定期设置T N的确,由于流量不会增加周长,因此流量的唯一可能的限制点是球的工会,因此作者可以实质上应用它们在R 2中获得的稳定性结果而不会发生太大变化。
Ph.D.入学考试教学大纲2024年1月Ph.D.入学考试教学大纲2024年1月
1。基本电子PN连接二极管,硅的能带,内在和外部硅。硅的运输:扩散电流,漂移电流,迁移率和电阻率。载体,PN连接二极管,Zener二极管,隧道二极管,BJT,JFET,MOS电容器,MOSFET,LED,PIN,PIN和AVALANCHE PHOTO DIODE的产生和重组。二极管,BJT,MOSFET和模拟CMO的小信号等效电路。简单的二极管电路,剪裁,夹紧,整流器。晶体管的偏见和偏置稳定性; FET放大器。2。数字电子逻辑大门:或者,或者不nand,non,nor,ex-or,ex-nor;布尔代数,错误检测和校正代码,karnaugh地图,多路复用器和弹能器,BCD算术电路,编码器和解码器,触发器:S -R,J-K,J-K,T,T,D,D,Master-Slave,Edge,Edge触发; p-n连接,D/A和A/D转换器的切换模式操作。3。微处理器简介微处理器,8085/8086微处理器:体系结构和框图; 8085/8086微处理器的指令集:数据传输说明,算术说明,分支说明,循环说明; 8255 PPI芯片建筑; 8259可编程中断控制器,8237 DMA控制器。4。数字信号处理离散时间信号,离散时间系统,时间信号的采样,数字过滤器,多段数字信号处理,ADSP 2100,DSP处理器,DSP的应用,DSP IN:通信,语音处理,图像处理,生物医学和雷达5。D.C.电动机和感应电动机等7。工业驱动器的电动驱动器组件;电气驱动器的选择;电动驱动器的动力学;时间和能量的计算;瞬态操作损失;稳态稳定性和负载均衡。闭环控制相位锁定环(PLLL)控制;电动机加热和冷却的热模型;运动税和电动机等级类别。启动;制动和电动机的速度控制;象限驱动器;负载类型;过程行业使用的扭矩和相关控件;选择电动机和继电器。无刷直流电动机,步进电机,切换的不情愿马达6。电力系统一般布局和热电站的主要组件(简而言之)。可用的水电;选择用于水力发电站的地点;他们的分类;布局和主要组件(简而言之)。核电站 - 拟合能量;一般布局和主要组件(简而言之);废物处理;核反应堆的类型(简而言之);一般布置和主要组成部分(简而言之);核辐射的类型及其作用。使用同步冷凝器改进系统的功率。传输系统计算电阻,电感,单导体的电容,多导体,单相和三相传输线的计算;换位;双电路线;皮肤和接近效应;广义ABCD常数;短和中线的表示和稳态分析;调节和效率;名义– T和PI电路;长线:电流 - 电压关系,双曲线解;冲浪阻抗;冲浪阻抗载荷;总电路等效表示;费兰蒂效应;电源通过传输线;一条线的反应性发电 /吸收;动力传输能力;分流和系列补偿(简而言之)。

Gregory L Plett PDF
电池技术和建模:一种全面的资源,发展了对电化学细胞如何工作的数学理解,对于最大化电池包的安全性,寿命和性能至关重要。这个新资源着重于创建基于物理的微型模型方程,连续尺度模型方程和减少阶模型方程,以提高我们对电池电池的理解。本书描述了常用的等效电路类型电池模型,并在不同的长度尺度上为基于物理的锂离子细胞的基于物理的基于物理的模型开发了方程。此外,它提出了一种称为“离散时间实现算法”的突破性技术,该技术会自动将基于物理的模型转换为高保真近似近似模型。Gregory Plett,科罗拉多州科罗拉多大学电气和计算机工程学教授,在电池研究和开发方面拥有丰富的经验。他拥有卡尔顿大学和斯坦福大学的学位,并在顶级期刊上发表了许多论文。他目前的研究重点是应用控制系统概念来管理和控制混合动力和电动汽车中使用的高容量电池系统。格雷戈里·普莱特(Gregory Plett)获得了他的硕士学位和Ph.D. 1992年和1998年分别获得了斯坦福大学电气工程学位。他于1998年加入了科罗拉多州科罗拉多斯普林斯大学(UCCS)的教职员工,目前是电气和计算机工程的教授。他还管理了由联邦和行业来源资助的研究项目。Gregory已在包括斯坦福大学,NacionalAutónomadeMéxico和UCCS的各个机构教授课程,并在著名的期刊上发表了论文。Gregory是IEEE的高级成员,并拥有多项专利作为共同发明者。他的研究重点是应用控制系统概念来管理混合动力和电动汽车中使用的大容量电池系统。当前的研究领域包括基于物理的建模,系统识别和细胞状态的估计。UCC高容量电池研究实验室提供了用于测试单元和模块的设备,从而实现了先进的算法原型和理论研究。Gregory教授控制系统的研究生课程,尤其是专注于电池控制以支持他的研究。格雷戈里(Gregory)出生于加拿大渥太华,获得了B.Eng。学位于1990年获得卡尔顿大学,此后一直在UCC担任学术职位。 UCCS研究人员正在进行有关估计电池的电荷,健康和寿命的研究,并使用模型预测控制方法和其他先进技术来预测功率和能量,以延长电池寿命。 实验室还专注于电池组的快速充电功能。 这项研究涉及理论和经验方法,并访问了自定义电池管理系统和模拟器项目等高容量设备和工具。学位于1990年获得卡尔顿大学,此后一直在UCC担任学术职位。UCCS研究人员正在进行有关估计电池的电荷,健康和寿命的研究,并使用模型预测控制方法和其他先进技术来预测功率和能量,以延长电池寿命。实验室还专注于电池组的快速充电功能。这项研究涉及理论和经验方法,并访问了自定义电池管理系统和模拟器项目等高容量设备和工具。
使用量子存储器
量子控制是指具有所需精度为1的动态量子系统从初始目标或结果1。几种模拟控制波包及其应用的理论和实验方法对于为将来的仿真或量子计算方案铺平道路非常有用。在其中许多中,要控制的物理系统都是由外部电位驱动的,外部电位需要一直在体验中控制,直到达到目标为止。尽管在这项工作中我们没有声称提供量子控制的一般理论,但我们提供了一种新方法,其中控制方案一劳永逸地编码为其初始状态。这里的主要主角不是通用量子系统,而是在离散时间4 - 6中进行量子步行(QW)。鉴于此简单系统的公认多功能性,实际上似乎是一种特殊的选择,实际上具有巨大的潜力。实际上,QW是一种通用的计算模型7、8,它涵盖了大量的物理和生物学现象,与基本科学和应用都相关。应用程序包括搜索算法9 - 12和图形同构算法13,以建模和模拟量子14 - 18和经典动力学19,20。这些模型引发了各种理论调查,涵盖了数学,计算机科学,量子信息和统计力学领域的领域,并在任何物理维度21、22和几个拓扑结构中都定义了23 - 25。QW出现在多个变体中,可以在任意图上定义。本质上,这些简单的系统具有两个寄存器:一个用于图表上的位置,另一个是其内部状态,通常称为硬币状态。它在图表上以内部状态为条件,类似于经典案例,在每个步骤中,我们翻转硬币以确定步行者的方向。本质上的区别在于,在量子情况下,步行者在图表上以从节点开始的各个方向上传播。此功能允许量子步行器四四式探索图形的经典范围,该属性使设计非常有用,例如高效的搜索算法。但是,我们不知道控制量子步行者演变的许多方法。例如,我们可以选择初始条件和进化操作员来调整步行者的方差σ(t)= af(t),其中a是一个真实的预替代器,f(t)通常是t的线性函数。然而,一旦它们在初始时间固定,f和a均在整个演化中保持不变,除非我们不允许进化操作员在每个时间步长以既定方式更改,否则在26、27中,这可能是非常昂贵的。我们如何在不必更改进化操作员的情况下控制沃克的动态?是否可以控制只有初始条件,方差或平均轨迹?在本手稿中,我们认为,以引入量子记忆的代价,答案是肯定的。带有内存的量子步行已经进行了研究,并有几种变体28、29。举例来说,这些修改的量子步行可能会有额外的硬币来记录沃克的最新路径,如30,31。在这里,这个想法是为网格中的每个位点定义一个额外的量子,步行者在整个演化过程中与之相互作用。令人惊讶的是,我们将证明整个系统的初始条件,内存 + Walker,足以控制步行者的方差和均匀位置。兴趣是双重的:从一方面,我们提供了一个简单的分布式量子计算模型,以控制单个量子沿其动力学,这将不需要我们控制和调整