XiaoMi-AI文件搜索系统
World File Search System突发
自主与人工智能测试 (AAIT)
• 如何衡量人机交互的有效性?• 如何设计有人-无人团队协调的测试?• 如何开发引发突发行为的测试?• 如何评估决策过程和认知,尤其是使用学习系统?• 如何设计分布式团队和群体交互的测试?• 如何开发完全覆盖规则的测试?• 如何为沉浸式环境创建足够智能的参与者?• 如何根据 SUT 参数和任务确定最突出的测试?• 如何衡量适应性和突发性?• 如何评估学习系统的成熟度?• 我可以安全地测试它吗?• 我可以在预算内/按时进行测试吗?


安全策略:接受、保护和威慑
在突发紧急情况发生后,当大量新的国际和国家非政府组织以及联合国机构抵达该地区时,东道国政府和社区很难区分不同的组织。由于在最初几周内,急救人员将交接给长期工作人员,人员流动速度很快,这可能会使情况变得复杂。所有部署的工作人员和当地雇员(包括经理、社区动员者和司机)都应了解贵组织将如何采用这三种策略以及如何与所有利益相关者建立认可度。

HyperRapid NXT 266
注释:1. 由于我们持续进行产品改进计划,规格如有变更,恕不另行通知。2. 所有规格均为 800 kHz 规格。3. 预热时间后,冷却器温度 = 23 +/- 0.1°C 4. 最大传输率下,可变衰减器和过程快门的最大功率。5. 800 kHz 操作下的 DUV 自相关。6. 超过 8 小时,±1°C 环境温度。7. 单脉冲操作(突发数 = 1)。8. 稳定状态(无脉冲选通或脉冲重复率变化)。9. M x 2 和 M y 2 的平均值。

rpm 2000 x、6000 x 和 10000 x 用户手册
3.3.2 采样值......................................................................................................................................20 3.4 突发模式..............................................................................................................................................22 4.电池电量低状态.........................................................................................................................................24 5.测量范围.........................................................................................................................................................25 6.清洁和处理.............................................................................................................................................26 7.运输和储存.............................................................................................................................................27 8.服务和维护.............................................................................................................................................28 8.1 更换易损件.............................................................................................................................................30 8.2 更换电池触点.............................................................................................................................................31 8.3 更换电池触点弹簧.............................................................................................................................31 9.校准...........................................................................................................................................33故障排除................................................................................................................................................32 9.1 电池外壳进水................................................................................................................................32 9.2 主外壳进海水................................................................................................................................33 10.
利用简单的交互进行复杂的学习
细胞自动机 (CA) 是数学的一个分支,它探索控制自主单元(称为细胞)行为的简单规则如何导致复杂的突发模式。计算领域的先驱约翰·冯·诺依曼在 CA 的发展中发挥了重要作用。尽管冯·诺依曼以现代计算机的基础架构(“冯·诺依曼架构”)而闻名,但他晚年对 CA 着迷不已。他死后出版的著作《计算机与大脑》深入探讨了他对简单、分散的规则如何产生类似于生物过程的智能行为的思考。
3/25/24, 11:20 AM 波多黎各经济预计未来十年增长 1.8% – 新闻是我的业务
Maria Miranda 是一名调查记者兼编辑,在波多黎各的英文报纸工作了 20 年。在担任该职位期间,她曾参与过长期项目,并在严格的截止日期内报道过突发新闻。她擅长从公共数据库中挖掘数据并采访人物(包括公众人物和私营部门个人)。她也是一名翻译,曾编辑和翻译过一本关于波多黎各财政危机的经济书籍。在最近的飓风玛丽亚恢复工作中,她担任联邦紧急事务管理局的口译员,并获得了联邦紧急事务管理局的徽章。
2025 年春季和夏季继续教育
本美国心脏协会标准急救课程为个人提供必要的知识和技能,以便在医务人员到达之前识别和提供对受伤和突发疾病的基本护理。课程涵盖所有必修主题,例如识别紧急情况、优先护理、使用或应用救援呼吸、实施成人心肺复苏术和包扎伤口。课程结束时,讲师将进行美国心脏协会急救/心肺复苏术证书考试。本课程获得的证书有效期为两年。注意:本课程不适用于 EMT 急救员的专业重新认证。
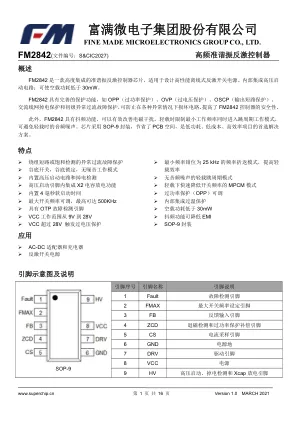
富满微电子集团股份有限公司
为了进一步避免声音噪声,该电路通过将跳周期模式期间的突发频率限制在 800 Hz 的最大值来防止开关频率 进入可听范围。这是通过一个定时器实现的,该定时器在安静的跳周期工作模式期间被激活。在该计时器计数结束 前,不允许打开开关周期。随着输出功率的降低,开关频率降低,一旦达到 25 kHz ,即达到进入入阈值并进入跳 周期模式。关闭开关管,停止开关周期,一旦开关停止, FB 将上升。一旦 FB 越过跳周期退出阈值(这时仍然为 跳周期工作模式),则打开驱动脉冲。此时,一个 1.25 ms 的计时器 tquiet 与一个计数到 3 的计数器一起启动。下 次 FB 电压降至跳入阈值以下时,只要计数到 3 个驱动脉冲,驱动脉冲就会在当前脉冲结束时停止(至少打开 3 个 开关脉冲)。在计时器计时结束之前不允许再次启动,即使先达到跳周期的退出阈值。需要注意的是,计时器不会 强制下一个循环开始,如果在计时器计时结束时未达到跳周期的退出阈值,则驱动脉冲将等待 FB 达到跳周期退出 阈值。这意味着在空载期间,每次开关至少会有 3 个驱动脉冲,脉冲串间隔周期可能远长于 1.25 ms 。该工作模式 有助于提高空载条件下的效率。 FB 电压必须升高超过 1 V ,才退出跳周期模式。如果在 tquiet 计时结束前 FB 电压 大于 1V ,则驱动脉冲将立即恢复,即控制器不会等待计时器结束。图 4 提供了一个安静跳周期工作原理的示例。
基于DAG 和AHP-TOPSIS 算法的多乘员协同任务分配方法研究
等方面 . 人机功能分配主要包括静态和动态两种类型 , 静态功能分配是从功能特性和需求分析入手 , 通过比较人 和系统在完成该功能上的能力优势或绩效优劣 , 决定该功能分配给人还是系统 . 动态功能分配方法则是在静态 人机功能分配的基础上 , 当动态触发机制响应时 , 允许系统在运行阶段根据情况的变化将功能在人与系统之间 动态地重新分配 , 提高整体的工作效率 . 多智能体的任务分配是指在作战开始前 , 指挥中心通常会根据已掌握的 战场信息 , 对己方作战单元进行任务预分配 . 但随着战场情景变化以及突发情况的出现 , 预分配方案可能会使得 执行任务的效能降低 , 多智能体如何调整自身任务 , 使得执行任务的效能保持最大是其研究的主要内容 . 计算机 任务调度研究的是将任务动态地调用给各个虚拟机并提供给用户使用 , 怎样合理地将任务分配给不同的虚拟机 , 进而提升整个系统的性能是其研究的重点 . 以上分配原则对于多乘员分配有很好的参考价值 , 但舱室乘员间任 务分配时 , 主要考虑到人的特性 , 需要以人的理论基础来加以研究 [4] . 针对实际作战过程中 , 乘员应对非预期事件效率低下的问题 , 本文提出了一种多乘员协同动态任务分配方 法 . 在非预期事件触发时 , 对任务进行 DAG 分解及分层 , 根据乘员脑力负荷、乘员能力、任务相关度以及时间成 本四个因素 , 按照一定的任务分配顺序 , 基于 AHP-TOPSIS 方法进行乘员的优选 , 实时更新乘员状态 , 并以此为 依据进行下一任务的分配 . 任务分配过程可实现随乘员状态变化而动态调整 , 达到负荷均衡、效能最优 , 从而将 多任务分配问题简化为单个任务的多属性决策问题 .